Toutes
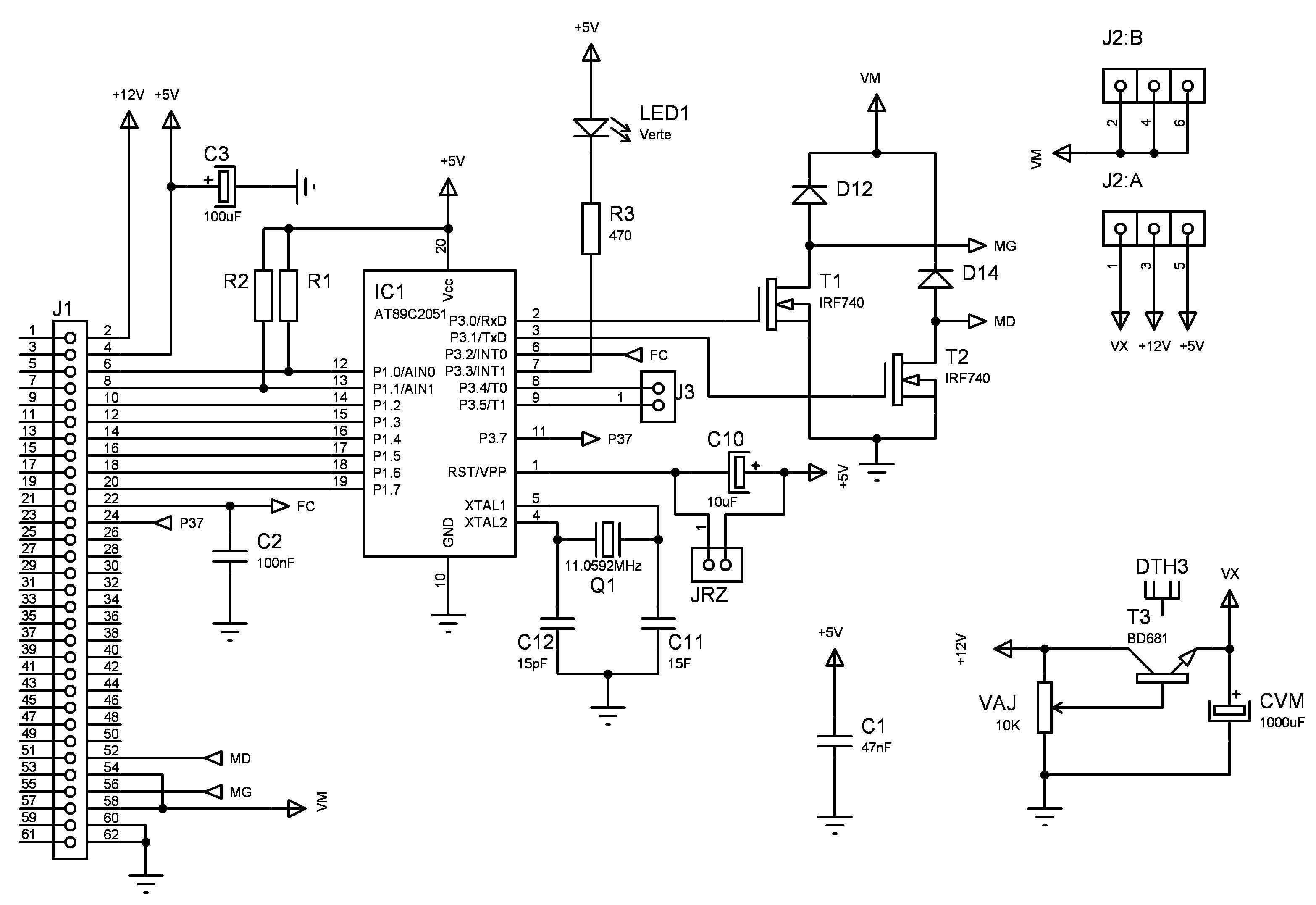
les cartes de guidage utilisent le même microcontrôleur ATMEL 89C2051.
Les capteurs optiques sont connectés sur le port P1.
Les ports P3.0 et P3.1 commandent les MosFet de puissance T1 et T2 chargés dans leur
drain par les moteurs.
D12 et D14 sont des diodes de roue libre rapides.
Une diode led (LED1) est commandée par le port P3.3.
Cette led permet, entre autre, de valider le fonctionnement de la carte électronique par
un petit programme simple de clignotement.
Le fin de course FC est connecté au port P3.2 (INT0) et permet l'arrêt du robot
grâce à un petit poussoir prévu à cet effet à l'avant de celui-ci.
|
Une
alimentation variable rustique ( T3 , VAJ) fournit une tension VX comprise entre 0V et
12V.
Le connecteur J2 permet de sélectionner la tension moteur par le positionnement d'un
petit cavalier.
Les moteurs sont donc alimentés au choix par du 5V, du 12V, ou une tension variable VX.
VX permet de régler la vitesse maximale du robot.
|