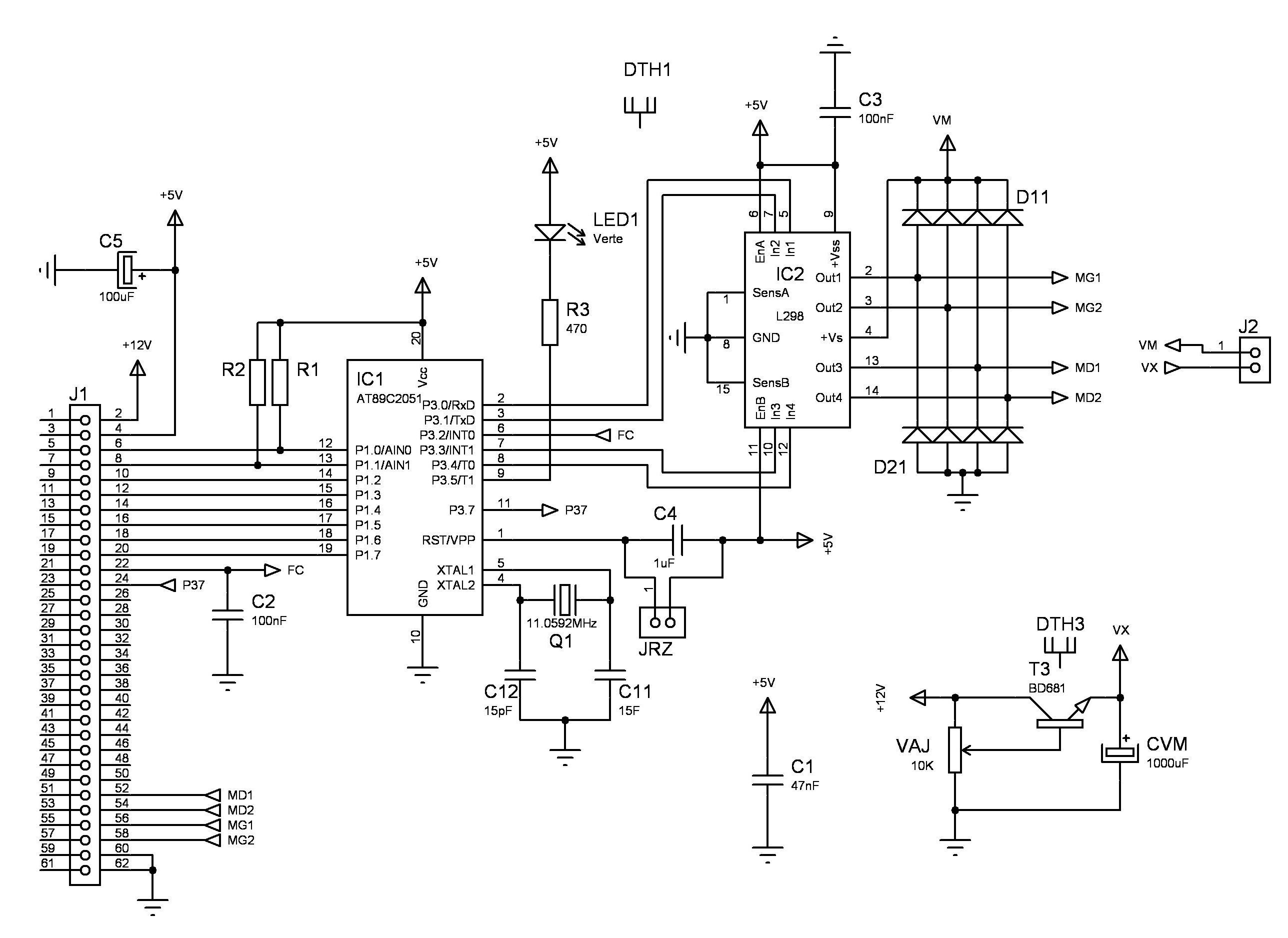
L'utilisation
d'un circuit spécialisé double pont en H L298
augment considérablement les
possibilités du robot.
Ce circuit dispose de toute
l'électronique nécessaire pour commander deux moteurs à courant continu, dans les deux
sens de rotation.
Seules les diodes de roue libre sont à prévoir.
Une limitation du courant maximal des moteurs est possible grâce aux broches "SenseA
et SenseB" prévues à cet effet.
Quatre lignes de port du microcontrôleur sont utilisées pour commander les deux moteurs
dans les deux sens en faisant varier la vitesse. |