Le
robot doit suivre une ligne blanche de 19mm de large sur fond bleu.
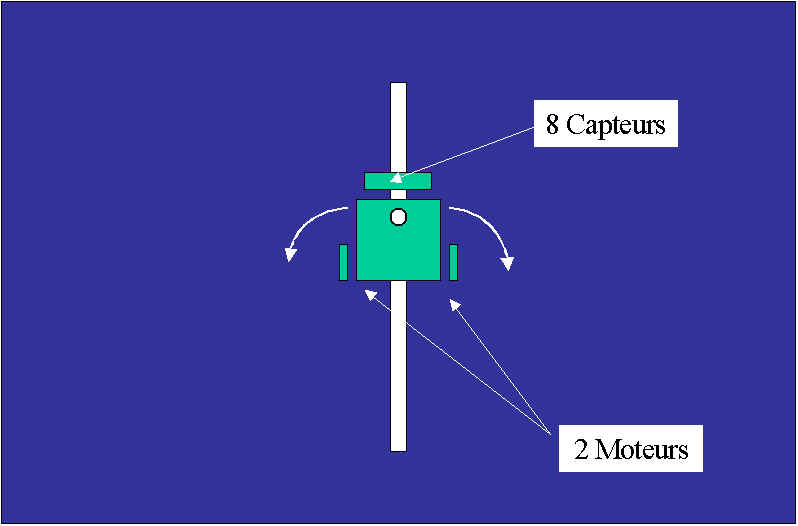
C'est un tripode constitué d'une roue folle placée à l'avant et de deux moteurs,
accouplés à deux roues, situés à l'arrière.
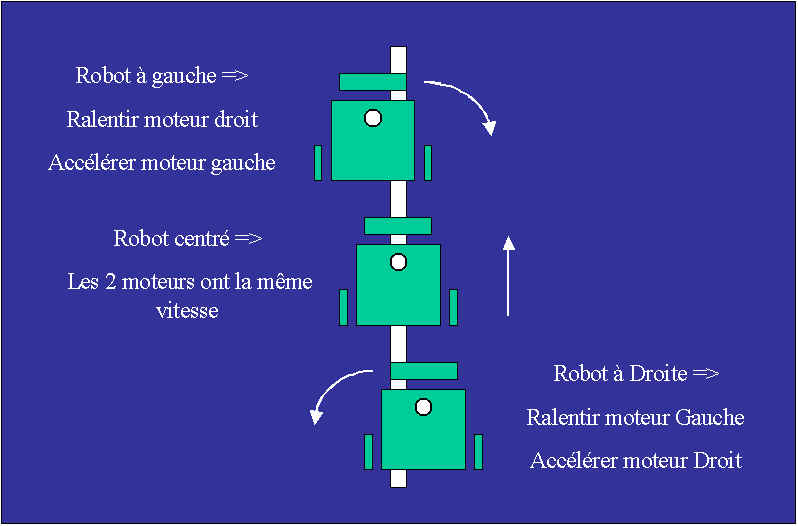
Les moteurs assurent la propulsion et la direction du robot. Des capteurs optiques situés
à l'avant permettent la détection de la ligne.
Les difficultés
liées au concours de robotique de Vierzon ( priorité à droite, raccourcis etc...) ne
sont pas abordées ici.
Cette contribution n'est qu'un exemple de réalisation permettant une approche simple d'un
robot suiveur de ligne.
Le choix du type de capteurs, la position de ces capteurs par rapport à l'axe des roues,
influent sur le comportement du robot.