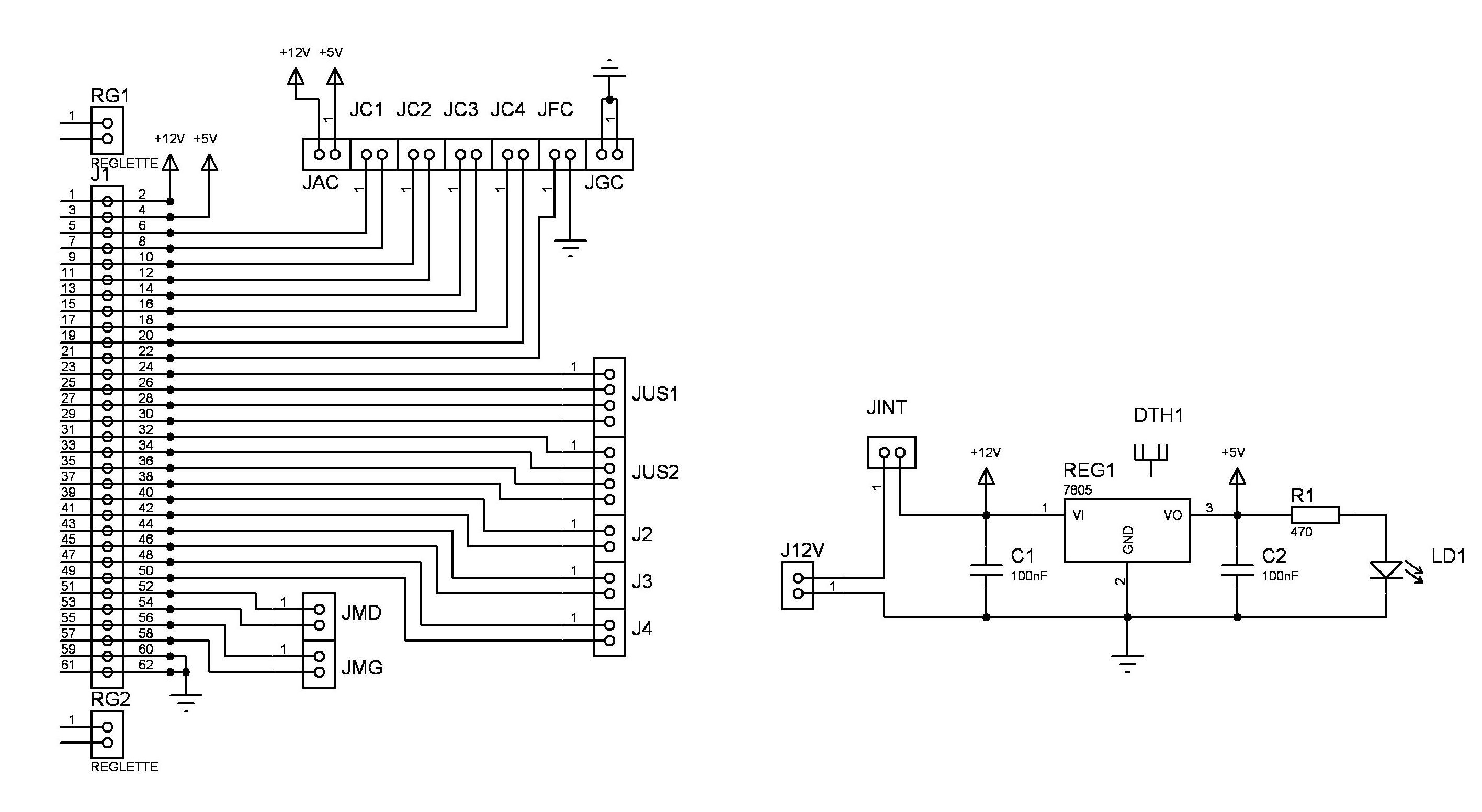
La
carte mère a deux fonctions:
- recevoir la carte
de contrôle de moteur (connecteur J1)
- fournir une tension
5V régulée à partir de la batterie 12V
Elle dispose également de
connecteurs permettant de relier les capteurs (JC1 à JC4), ainsi que des connecteurs
subsidiaires (JUS1, JUS2, J2, J3 et J4).
Tous
ces connecteurs sont ramenés sur le slot J1 qui dispose de deux réglettes de centrage de
carte. |
|
|