Les
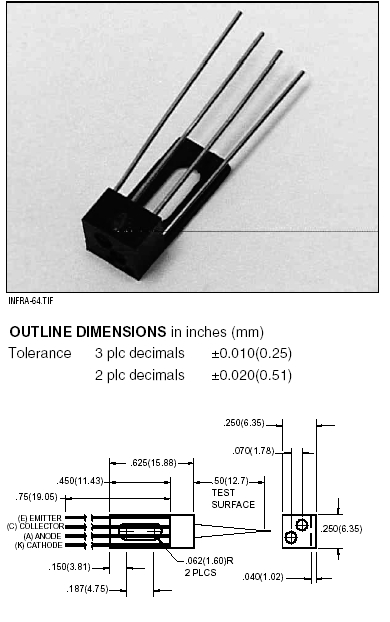
capteurs sont des fourches optiques à réflexion infra-rouges.
Nous avons opté pour des capteurs HOA2498 -2 (HONEYWELL) à photodarlington, qui disposent
d'une focale de 12mm. |
|
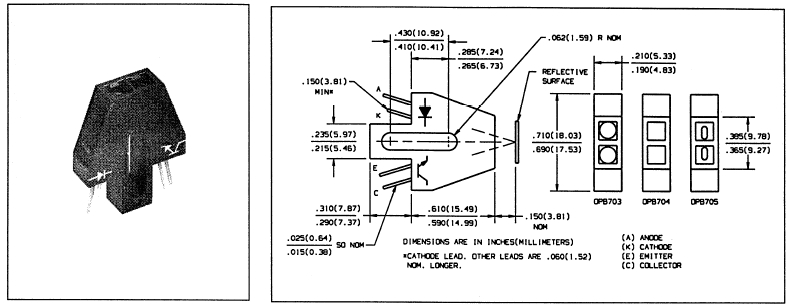
D'autres
types de capteurs peuvent être utilisés comme par exemple des OPB704 (OPTEK)
de mm de focale.
|
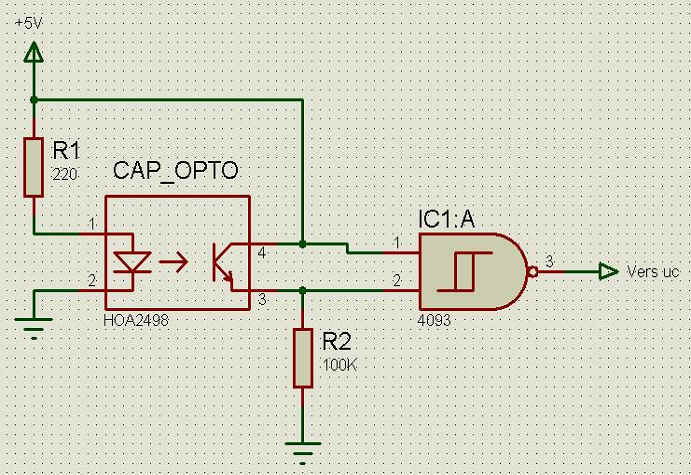
Une
porte Nand trigger de Schmitt assure la mise en forme du signal de sortie.
Nous sommes ici en logique négative: un capteur à la verticale de la ligne se traduit
par un "0" logique.
|
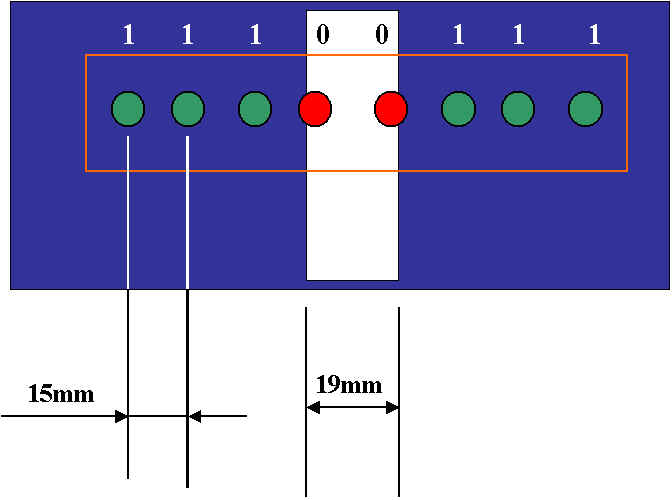
L'écartement
entre les capteurs (15mm) est inférieur à la largeur de la bande (19mm), ce qui permet
un plus grand nombre de combinaisons logiques, au détriment d'une largeur totale de la
barre de capteurs plus faible.
D'autres positionnements peuvent être envisagés.
Des comportements différents seront obtenus en disposant les capteurs non pas en ligne
mais sur une courbe.
L'écartement entre capteur peut également être réduit ou au contraire augmenté.
La position des capteurs par rapport à l'axe des roues change également le suivi de
ligne.
Plus les capteurs sont en avant de l'axe des roues plus le robot anticipera les virages
mais, dans ce cas, une petite différence de vitesse des moteurs se traduit par un
décalage important de la ligne de capteurs.
Le robot aura donc tendance à " pomper " en ligne droite.
Le nombre même de capteurs peut être modifié.
Dans l'absolu, deux capteurs suffisent pour un suivi lent de la ligne.
|
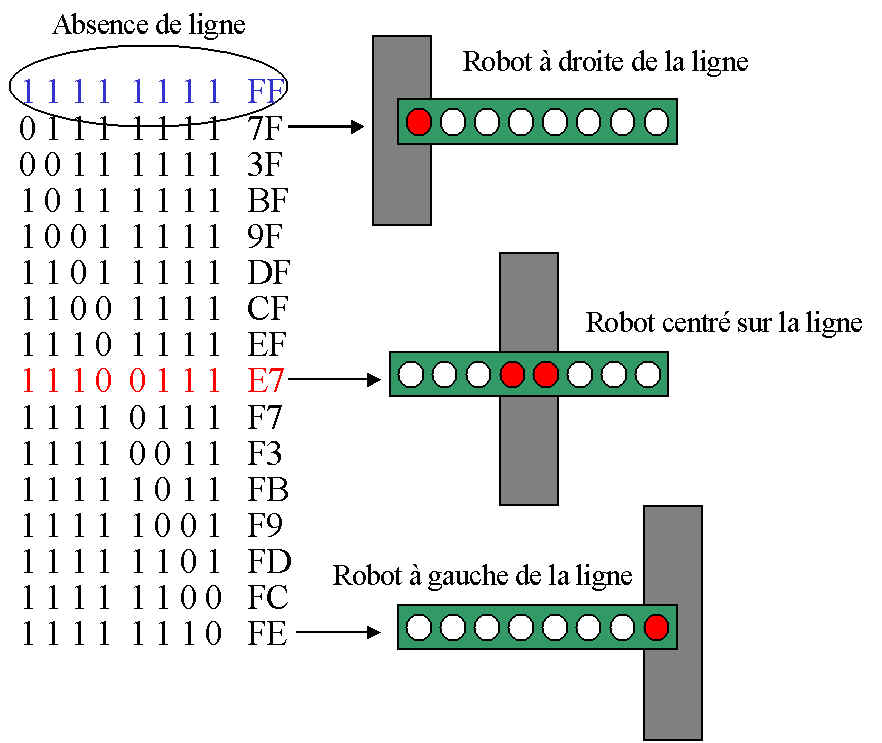
Tableau
récapitulatif des différentes combinaisons (binaires et hexadécimales) possibles.
|
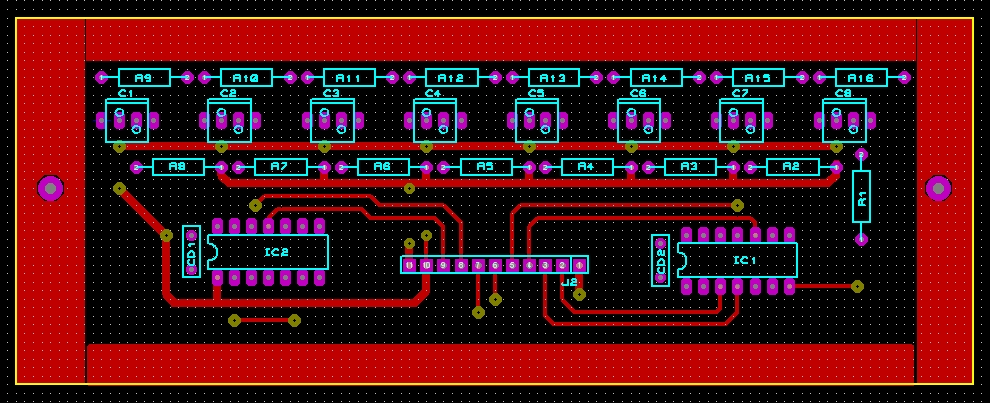
Exemple
de réalisation de la carte capteurs.
Un
carénage est prévu pour éviter autant que possible les perturbations dues à la
lumière extérieure.
|

|
|
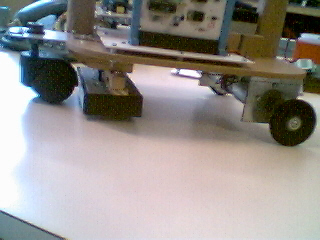
La
ligne de capteurs est fixée sur le robot en respectant au mieux la focale des
capteurs utilisés (ici 12mm).
Le positionnement de la ligne de capteurs est rendu plus aisé grâce à la carte
d'affichage d'écrite §3.2 |
|
|
