Cette
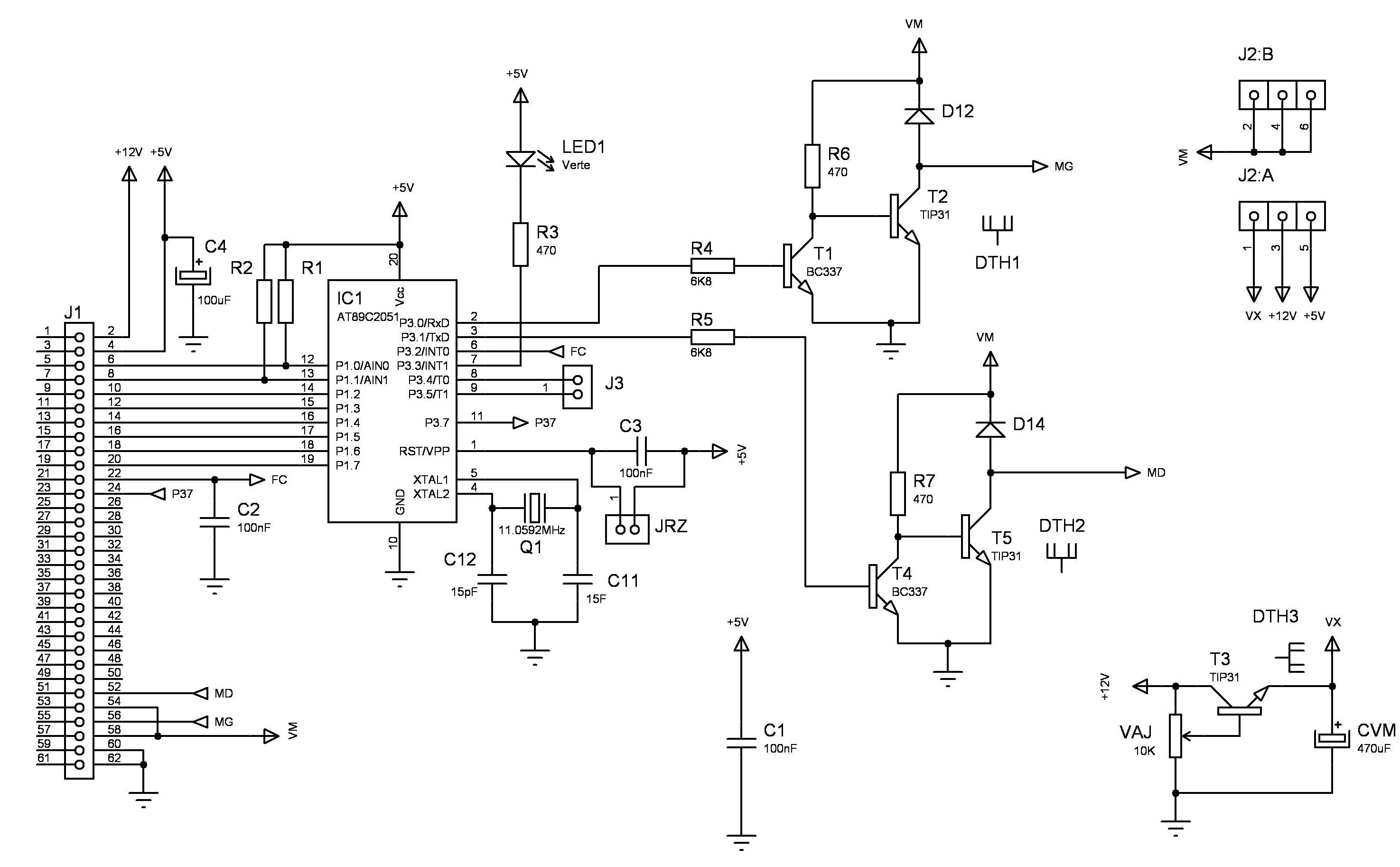
carte est identique à la version précédente à l'étage de puissance prés.
La sortance des ports du microcontrôleur étant faible, tout comme le gain en courant des
transistors de puissance (T2,T5),
il est nécessaire de prévoir un étage intermédiaire (T1 et T4).
Ce montage à deux transistors a pour conséquence d'inverser la logique de commande des
moteurs.
Un état logique haut en sortie de port se traduit par un arrêt du moteur.
|