Les Entrées TOR
-
Capteur de
forçage moteur
A partir
de la broche SenseA du driver de moteur, nous avons
confectionné une
entrée Tout Ou Rien
(TOR) pour automate programmable:ButeePince,
en utilisant des amplificateurs opérationnels.
ButeePince
= 0v alors la pince est en mouvement
ButeePince
= 24v alors la pince est ouverte ou fermée
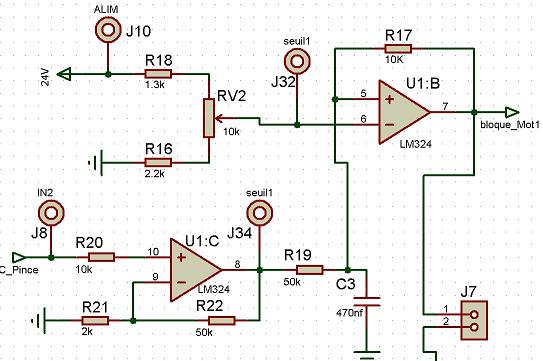 Schéma des
capteurs de forçage moteur
Schéma des
capteurs de forçage moteur
C_Pince est la
broche SenseA, issue du
driver L298N indiquant que la pince force.La tension
issue en ce point est faible, de l'ordre de 200mV. On a donc
amplifié ce signal par 26 pour faciliter le
réglage de la
tension de comparaison ( potentiomètre RV). Entre le montage
amplificateur et le montage comparateur, nous filtrons le signal, car
C_pince est bruité. Les 2
montages
utilisent un amplificateur opérationnel LM324.
