Carte d'Interface de
Commande
des moteurs
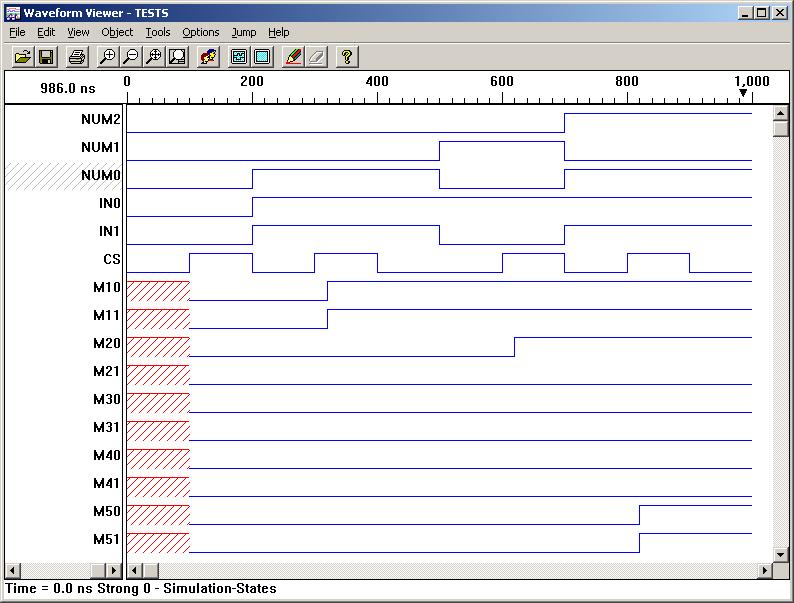
Simulation de
la PAL
On constate en effet,
que sur le front montant du CS,
on recopie les valeurs de IN1
et IN0
sur les sorties du
moteur dont le numéro est donné par Num2,
Num1
et Num0. On
remarquera
également
que ces sorties sont mémorisées
Les
ressources pour programmer la GAL sont
téléchargeables ici :
