L'application
de Supervision La
Supervision sur PC du bras manipulateur était
prévu
dès le commencement du projet. Cette supervision consiste en un
affichage en 3 dimensions du robot, le plus
rapidement possible. Cette
application se
décompose en 2 phases:
- La
première phase consiste
à récupérer les informations des
capteurs de
positions du bras dans l'IPC
- La
deuxième phase est
l'affichage en 3 dimensions du robot en fonction des valeurs des
capteurs
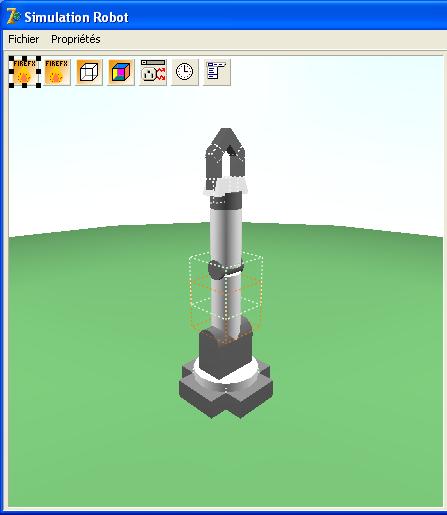
Rendu du bras conçu à partir de l'arbre ci-contre
(8 cylindres,7
cubes, 1 prisme)
|  |
|
Arbre de
conception du bras avec la GLScene |
Composants GLSCene
La conception du robot
en
images de synthèse a été facilitée par la
bibliothèque GLScene que vous pouvez trouver sur le site OpenGL
Solution for Delphi.
Nous avons commencé en 2001 avec la
GLScene5 et nous avons terminé en 2005 avec GLScene_SnapShot. Cette
bibliothèque de composants permet de concevoir facilement des
images de synthèse en 3 dimensions à partir de formes
élémentaires telles que le Cube, La Sphère, le
Cône, le Cylindre ...., dans l'environnement graphique OpenGL.
