|
|
|
|
Chapitre 5. Communication TCP/IP
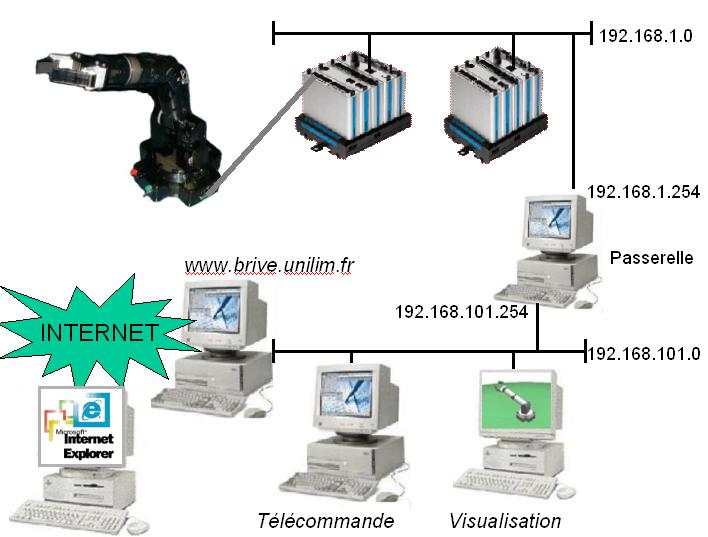
Le réseau ETHERNET
à l'I.U.T.
Comme
le
montre le schéma ci-dessous, plusieurs
éléments
sont connectés sur un réseau ETHERNET.
Le réseau
d'automates est construit autour d'un ancien HUB à
10MBits et a pour adresse: 192.168.1.0.
Le réseau
de PC a pour adresse: 192.168.101.0.
Nous utiliserons deux PC: un PC Télécommande et un PC
Visualisation.
Une passerelle
possédant les deux adresses 192.168.1.254
et 192.168.101.254 permet de
passer d'un réseau à l'autre.
Le serveur WEB
de l'I.U.T. (www.brive.unilim.fr) donne la possibilité à
tout Internaute de piloter le robot depuis l'extérieur
|
|
|
|
|
