5.4. La Télécommande développée à travers des Sockets
La Télécommande est une
application Delphi
exécutée sur un PC qui envoie un mot de commande à
l'IPC.
Sur un réseau local, comme
celui de notre établissement, le
protocole UDP est suffisant, car le risque de perdre une trame
est très faible et sans conséquence.
Dans le cas d'une communication sur INTERNET, il est
préférable d'utilisé le protocole TCP. La
principale différence entre ces deux protocoles, de même
niveau dans les couches d'Interconnexions
des Systèmes Ouverts
(couches I.S.O.), est qu' UDP
est un protocole en mode NON
Connecté, alors que TCP
est un protocole en mode
Connecté.
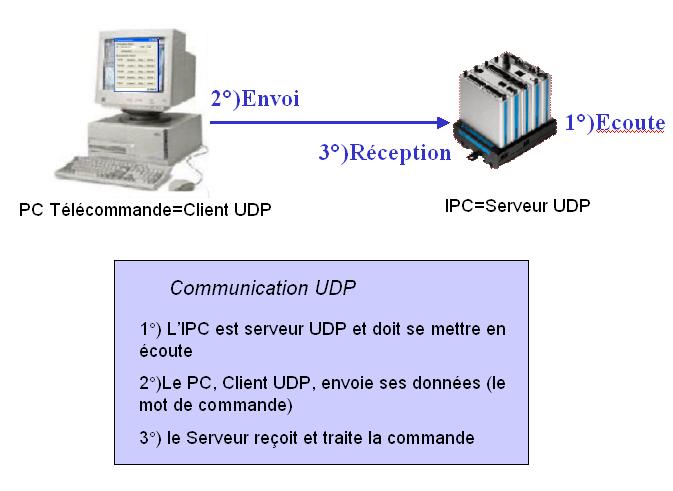
Le protocole UDP, non connecté,
consiste simplement à envoyer des
informations à un serveur. Si ce dernier est en
écoute et qu'il n'y a
pas de problème de transmission, il recevra les
données, sinon elles seront perdues.
Dans le protocole TCP, qui est un protocole
en
mode connecté, la télécommande doit faire une demande de connexion au
serveur distant qui devra l'accepter
et transmette cette acceptation.
Une fois la confirmation reçue, la connexion entre le Client (la
Télécommande) et le Serveur (l'IPC) est établie.
L'envoi des données
peut se dérouler jusqu'à la fermeture de la session.
|
|
