Un
socket est l'élément de base qui permet à toute
application de communiquer avec une autre application distante sur un
réseau ETHERNET. C'est en quelque sorte la "prise" grâce
à laquelle il est possible de se connecter au monde INTERNET en
utilisant le protocole TCP/IP. Ce type d'application est
appelée
Client/Serveur, car une
application doit être en écoute
(c'est le Serveur), et l'autre (le Client) se connectera au
Serveur afin d'échanger des données jusqu'à la
fermeture de la connexion.
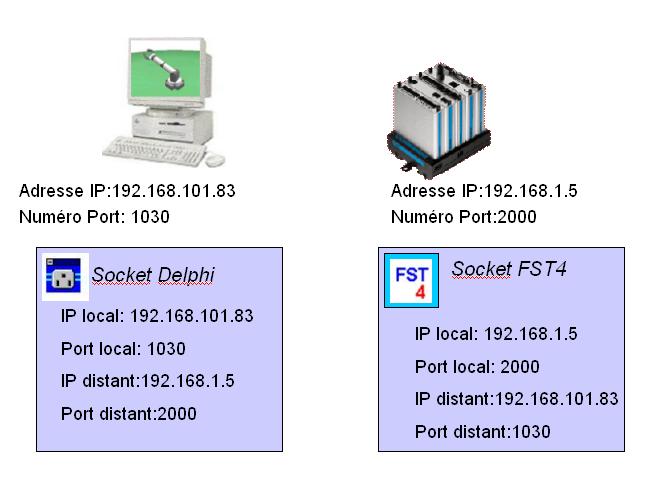
Un socket, en
informatique des réseaux, est en fait l'association de 2 couples
(adresses IP, numéro de port), l'un local
et l'autre
distant :