L'Automate
Programmable IPC HC16 gère le bras manipulateur par des
mots de commande contenu dans l'Automate, les FlagsWords FW1 à
FW5, également nommés : FWPince,
FWPoigne, FWCoude,
FWEpaule et FWSocle.
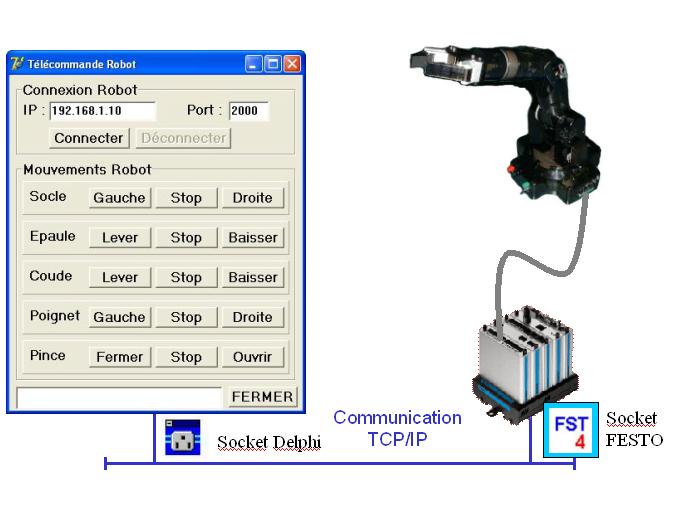
Pour piloter le robot à distance, il suffit
donc d'écrire dans ces mots.
Nous avons développé une
Télécommande sur PC qui communique avec l'IPC pour
modifier ces FlagsWords.
Cette Télécommande a
été faite selon deux approches différentes:
- Une communication
INTERNET à travers les Sockets
des langages respectifs de développement :
-
Les Sockets sous FST4.21 pour
l'IPC
-
Les Sockets sous Delphi7 pour
la télécommande PC
Nous
avons donc écrit deux programmes différents, un dans
chaque langage qui dialoguent entre eux (Rq : Cette solution est actuellement un
exercice réalisé en Travaux Pratiques par les
étudiants de 2ème année)
