Les capteurs Interrupteurs
Afin d'arrêter les moteurs lorsque leur axe arrive en
butée, plusieurs tâches gèrent ces
capteurs
de butée.
Exemple :
Tâche de gestion des 2 butées du Socle:
Si
ButeeDroite ou ButeeGauche alors
Arreter MoteurSocle
FSi
De plus chacun des moteurs a une
durée de fonctionnement limitée dans le temps.
Les
capteurs Forçage moteur
Le capteur ButéePince conçu à partir
de la broche SENSE du driver L298 sert à stopper le moteur
lorsque celui force. Or, ce dernier force à chaque
démarrage. Notre algorithme doit donc prévoir
deux cas de figure :
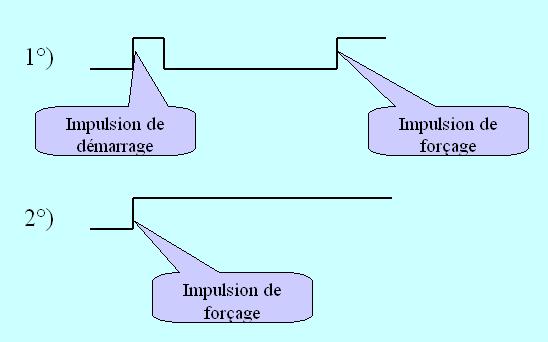
1°) Cas
normal:
Le moteur démarre, pour fermer ou ouvrir la pince, qui finit
par arriver en butée (ouverte ou fermée). Nous
devons donc détecter deux impulsions sur la broche SENSE
pour en déduire que le moteur force et le stopper
2°) La
pince est
déjà en butée : La pince
est ouverte et on demande de l'ouvrir, ou bien la pince est
fermée, et on demande de la fermer. Dans ces deux cas on ne
doit pas faire tourner le moteur de la pince