3.3. Programmation de la PAL
Carte d'Interface de
Commande
des moteurs
Programmation de la PAL
La
programmation
de la PAL a été réalisée
avec le logiciel
PALASM. Les PAL devenant aujourd'hui obsolètes, nous
avons
remplacé la PAL par une GAL, l'équivalent en
technologie
CMOS. Celle-ci a été
programmée
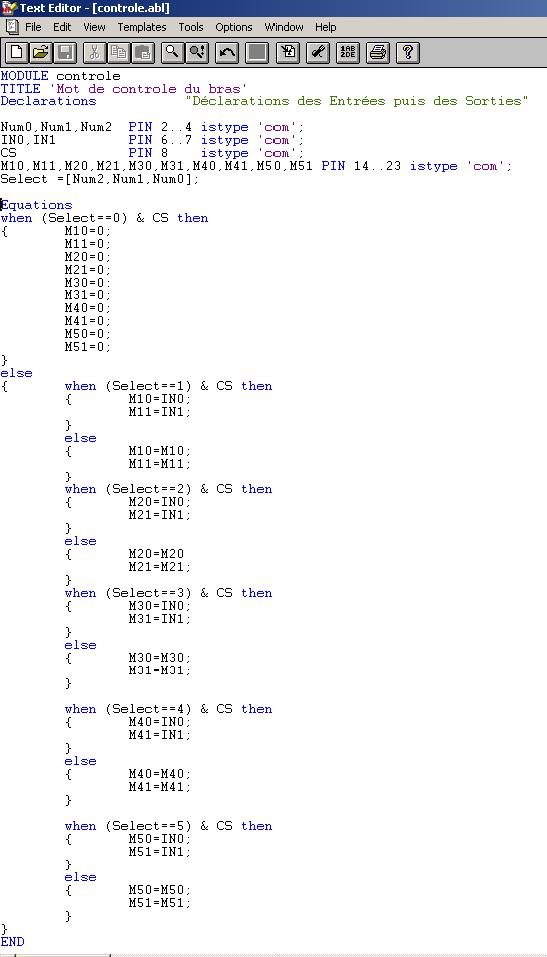
à l'aide du logiciel SYNARIO. Le
fichier
source de programmation de la GAL pour le robot est visualisé
ci-dessous.
Les résultats de simulation de ce fichier sont à
la
page suivante.
|
|