Les Entrées TOR
Nos Entrées Tout Ou Rien sont des capteurs de butée qui
indiquent la fin de course du déplacement d'un axe du robot.
Deux types d'entrée TOR ont été construits: les interrupteurs et les capteurs de forçage des
moteurs issus des drivers.
De simples interrupteurs
sont placés en fin de course des parties mobiles du bras. Une
came vient appuyer sur l'interrupteur et le ferme.
Le
socle a 2 butées
de fin de course conçues sur ce principe . La photo
ci-dessous
montre bien la came à gauche, et les 2 butées
(butée droite et butée
gauche) à droite de la photo.

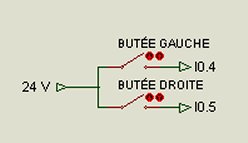
Les Butées de type Interrupteur
