Ce correcteur est intéressant lorsque le processus comporte un retard important.
En fait il peut être utilisé pour n'importe quel processus en faisant une identification la plus simple possible: on suppose que le processus se comporte comme un premier ordre retardé.
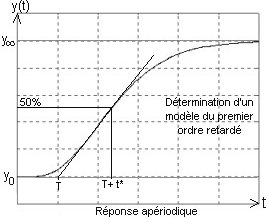
La tangente au point d'inflexion de la réponse indicielle permet de déterminer un retard important T.
A 50% de la variation on mesure le temps T+t* et on en déduit la valeur de la constante de temps du modèle:
t = t*/ln2 .
Tout système apériodique pourra donc être identifié par ce modèle simplifié (et bien sûr pas rigoureux):
T(p) = A.e
-Tp/(1+
tp) .
Le retard dans la boucle est très nocif, il diminue considérablement les performances de l'asservissement. En effet il apporte un retard de phase proportionnel à la pulsation et diminue fortement la marge de phase. Pour retrouver une marge de phase satisfaisante il faut diminuer fortement le gain de boucle, et par conséquent la précision et la vélocité deviennent médiocres.
Le principe du correcteur P.I.R. est de rejeter l'effet du retard à l'extérieur de la boucle.
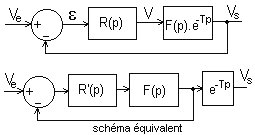
Nous allons déterminer la fonction de transfert R(p) de ce correcteur.
Nous supposons avoir identifié l'ensemble ampli-processus-capteur sous la forme d'un premier ordre retardé:
V
s / V = B.e
-Tp/(1+
tp) = F(p).e
-Tp et
R(p) = V/
eV est l'image de l'erreur corrigée.
Donc la fonction de transfert en boucle ouverte est: T(p) = R(p).F(p).e
-Tp .
En boucle fermée: W(p) = V
s/ V
e = [R.F.e
-Tp] / [1 + R.F.e
-Tp] .
Dans le schéma équivalent le retard est rejeté à l'extérieur de la boucle et le correcteur P.I. de fonction de transfert R'(p) corrige la boucle du premier ordre sans retard:
W(p) = V
s/ V
e = [R'.F/(1+ R'.F)].e
-Tp .
L'égalité des deux expressions de la fonction de transfert W(p) donne:
R/(1+R.F.e
-Tp) = R'/(1+R'.F) D'où R = R'/ [1 + R'.F(1-e
-Tp)] .
R'(p) correspond à la fonction de transfert d'un correcteur P.I.: R'(p) = K(1+T
ip)/T
ip .
F(p) correspond à la fonction de transfert d'un système du premier ordre: F(p) = B/(1+
tp) .
Réglage du correcteur P.I. de fonction de transfert R'(p) dans la boucle équivalente où seul subsiste le système du premier ordre de fonction de transfert F(p):
T(p) = K.B(1+Tip)/[Tip(1+tp)] .
Il est évident qu'il faut régler Ti = t et de cette façon l'asservissement se comportera comme un intégrateur bouclé suivi d'un retard (voir schéma équivalent page précédente).
Si on pose K = a/B, la fonction de transfert de l'asservissement devient:
W(p) = e-Tp/(1 + tp/a)
Alors qu'en boucle ouverte le processus est caractérisé par une constante de temps t importante et un retard T, l'asservissement (de classe 1, donc avec une erreur de position nulle), se comporte comme un système du premier ordre retardé (même retard qu'en boucle ouverte), mais avec une constante de temps t/a beaucoup plus faible (en pratique on peut régler a à 10 voire 15).
En réalité le processus n'étant pas vraiment un premier ordre avec retard, la réponse indicielle de l'asservissement présentera un dépassement, mais la vélocité de l'asservissement ainsi corrigé est spectaculaire (bien meilleure qu'avec un correcteur P.I.D.).
Malheureusement ceci n'est vrai que pour les variations de la consigne.
Vis-à-vis des perturbations, cette correction n'est pas bonne: seule la correction P.I. intervient alors. Et comme on a réglé Ti = t le temps de réaction à une perturbation est grand (même temps de réponse qu'en boucle ouverte).
En conclusion, le correcteur P.I.R. donne des réponses excellentes à des variations de consigne mais n'est pas efficace en réponse aux perturbations. Il peut donc être choisi dans des applications où la consigne varie très souvent, mais où le processus est peu perturbé.
