 |
Cours de Michel VERBEKEN
Maître de Conférences à l'IUT GEII de Montluçon
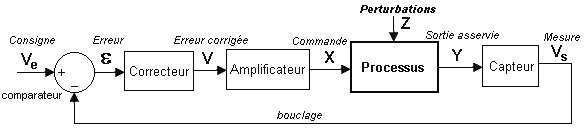
ASSERVISSEMENTS CONTINUS
|
Vous pouvez aussi consulter l'ensemble du cours au format pdf
ou le télécharger (enregistrer) sur votre disque sous la forme d'un fichier auto-extractible.
