|
7.2.1 Correcteur P.I. (actions proportionnelle et intégrale)
Ce correcteur permet un changement de classe de l'asservissement (de la classe 0 à la classe 1) donc permet une amélioration très sensible de la précision (plus d'erreur de position).
Par contre, le retard de phase apporté par ce correcteur ne peut en aucune façon améliorer la qualité vélocité de l'asservissement, au contraire!
Fonction de transfert du correcteur P.I.:
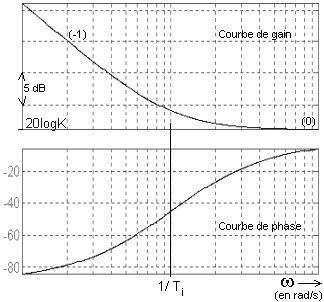
R(p) = K[1 + 1/(Tip)] = K(1 + Tip) / (Tip)
Transmittance harmonique: R(jw) = K(1 + jwTi) / (jwTi)
çR(jw)ç = [K(1 + w2Ti2)1/2] / wTi ^R(jw) = - 90° + arctan(wTi) .
Les lieux de Bode de R(jw) sont représentés ci-contre.
Critère de réglage:
Si on suppose que l'asservissement non corrigé, de classe 0, est très bien amorti (par exemple avec une marge de phase de 75°), on peut introduire le correcteur P.I. en gardant le même réglage de gain (action proportionnelle).
Afin de conserver un bon amortissement il faut que la pulsation 1/ Ti soit très inférieure à la pulsation critique de l'asservissement non corrigé, de façon à ne pas trop diminuer la marge de phase. Mais en classe 1 la marge de phase nécessaire est plus petite qu'en classe 0. Pratiquement, on règle:
Ti = (7,5 / wc) .
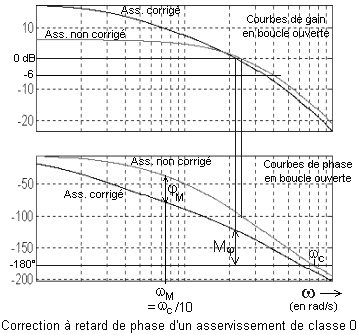
Comparez ci-contre les lieux de Bode en boucle ouverte avec et sans correcteur. Avec le critère de réglage énoncé, on constate que la pulsation wj, à l'intersection de la courbe de gain avec l'axe 0 dB, est pratiquement inchangée après correction.
|
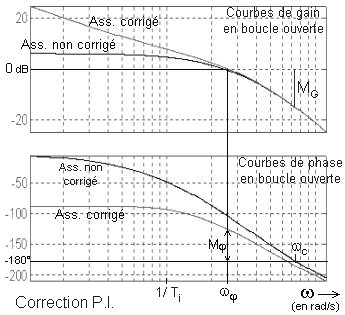 |
On constate sur les courbes de phase une diminution de la marge de phase d'environ 20° à 25° après correction, ce qui donne une marge de phase Mj optimale en classe 1.
On constate aussi que la pulsation critique, après correction, est très légèrement inférieure, mais ceci n'affecte en rien la marge de gain qui reste largement suffisante.
|
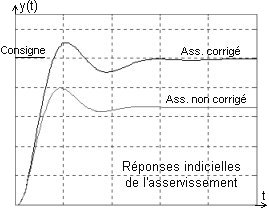
Les réponses indicielles de l'asservissement (en boucle fermée bien entendu) non corrigé puis corrigé par correcteur P.I. sont données ci-contre:
Sans correction l'erreur de position est très importante car pour assurer un bon amortissement le gain de boucle est faible (ici seulement 2 unités donc erreur de 33%).
Grâce à l'action intégrale la réponse de l'asservissement corrigé présente une erreur de position nulle.
Par contre le temps de montée est plus grand.
7.2.2 Correcteur à retard de phase
Ce correcteur ne change pas la classe de l'asservissement mais remonte la courbe de gain en boucle ouverte dans le domaine des basses pulsations, ce qui permet de diminuer soit l'erreur de position en classe 0 soit l'erreur de traînage en classe1.
Fonction de transfert du correcteur à retard de phase:
R(p) = K(1 + b.Tip) / (1 + Tip) avec b<1.
Transmittance harmonique: R(jw) = K(1 + jwbTi) / (1 + jwTi)
çR(jw)ç = [K(1 + w2b2Ti2)1/2] / (1 + w2Ti2)1/2
^R(jw) = arctan(wbTi) - arctan(wTi)
b étant inférieur à 1, l'argument est toujours négatif.
Les lieux de Bode de R(jw) sont représentés ci-contre:
La courbe de phase présente un axe de symétrie pour une pulsation wM qui est la moyenne géométrique des deux pulsations 1/(bTi) au numérateur et 1/ Ti au dénominateur:
wM = 1/(Ti.b1/2)
Pour cette pulsation le retard de phase maximum est:
jM = arctan(b1/2) - arctan(b-1/2) = - arcsin[(1-b)/(1+b)].
| 
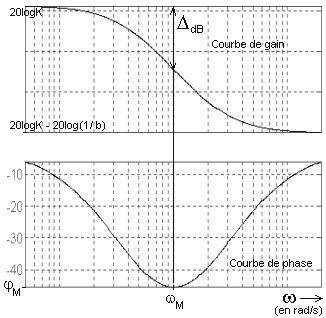 |
Pour cette pulsation wM, la diminution du gain par rapport à 20logK est:
DdB = - 10log(1/ b) .
Ci-dessous sont données les valeurs de jM et de DdB pour quelques valeurs de b.
b | 0,5 | 0,4 | 0,3 | 0,2 | 0,1 | 0,05 |
| jM | - 19,5° | - 25,4° | - 32,6° | - 41,8° | - 54,9° | - 64,8° |
DdB | - 3 dB | - 4 dB | - 5,2 dB | - 7 dB | - 10 dB | - 13 dB |
|
Nous allons montrer comment ce type de correction améliore la précision de l'asservissement en prenant un exemple en classe 0. Dans ce cas c'est l'erreur de position qui est plus petite. En classe 1 ce serait l'erreur de traînage qui serait plus petite.
On suppose que l'asservissement non corrigé, de classe 0, est très bien amorti (par exemple avec une marge de phase de 75°) mais son erreur de position est beaucoup trop grande. On souhaite augmenter le gain de boucle dans un rapport k (en pratique: maximum 5). Dans notre exemple nous avons choisi k = 3,75. L'erreur de position de l'asservissement non corrigé est de 33,3% (gain de boucle = 2 pour avoir un bon amortissement). Après correction l'erreur de position sera réduite à 11,7%.
Critère de réglage:
On règle b = 0,75 / k donc b = 0,2 pour notre exemple.
Puis nous calons la pulsation centrale du correcteur à une décade en dessous de la pulsation critique de l'asservissement non corrigé, afin de ne pas trop diminuer la marge de phase:
wM = wc/10 donc Ti = 10/(wc.b1/2) .
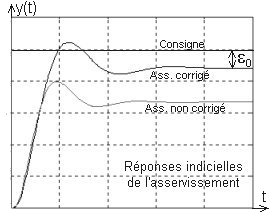
Avec ces réglages les marges de stabilité restent suffisantes. Par contre la bande passante de l'asservissement diminue un peu, donc l'amélioration de la précision se fait au détriment de la vélocité avec un correcteur à retard de phase. Les réponses indicielles (en boucle fermée bien entendu) sont données ci-contre:
|
 |
Si l'on faisait un exemple en classe 1 (erreur de position nulle), nous aurions les mêmes résultats avec le même critère de réglage, simplement ce serait l'erreur de traînage qui serait divisée par k.
En fait ce type de correction est très peu utilisé, car avec les mêmes composants on peut réaliser un correcteur à avance de phase qui donnent des résultats beaucoup plus intéressants.
