Dans ce dernier paragraphe nous allons aborder les équations de récurrence qui sont le point de départ de l'étude des systèmes échantillonnés.
Lorsqu'une fonction continue v(t) est échantillonnée, on s'intéresse à sa valeur à des instants séparés par une période d'échantillonnage Te:
vk-1= v(tk-1) vk= v(tk) et Te= tk - tk-1 .
La dérivée dv(t)/dt à l'instant tk est donc: (dv/dt)tk= (vk - vk-1) / Te .
De même on peut exprimer la dérivée seconde:
(d2v/dt2)tk= [(dv/dt)tk - (dv/dt)tk-1] / Te = [(vk - vk-1) / Te - (vk-1 - vk-2) / Te] / Te
(d2v/dt2)tk= (vk - 2.vk-1 + vk-2) / Te2 .
Application au correcteur P.I.D. de type parallèle de fonction de transfert: R(p) = K[1 + 1/ Tip + Tdp/(1+ Tdp/Kd)].
Cette fonction de transfert mise sous forme d'un rapport de deux polynômes est : R(p) = (K + ap + bp2) / (cp + dp2) avec:
relations (1): a = K(Ti + Td/Kd) b = K.Ti.Td(1 + 1/Kd) c = Ti d = Ti.Td/Kd .
La fonction de transfert du correcteur est donc: R(p) = V(p)/e(p) = (K + ap + bp2) / (cp + dp2) .
On en déduit l'équation différentielle: d.v'' + c.v' = K.e + a.e' + b.e''
Remplaçons les dérivées par les relations vues au début du paragraphe:
d.(vk - 2.vk-1 + vk-2) / Te2 + c.(vk - vk-1) / Te = K.ek + a.(ek - ek-1) / Te + b.(ek - 2.ek-1 + ek-2) / Te2
On en déduit l'équation de récurrence qui donne vk en fonction des 2 valeurs antérieures de v et de ek et des 2 valeurs antérieures de e:
vk = A.vk-1 + B.vk-2 + C.ek + D.ek-1 + E.ek-2 avec:
relations (2): A = (2.d+c.Te)/F B = -d/F C = (K.Te2+a.Te+b)/F D = -(a.Te+2.b)/F E = b/F F = (d+cTe) .
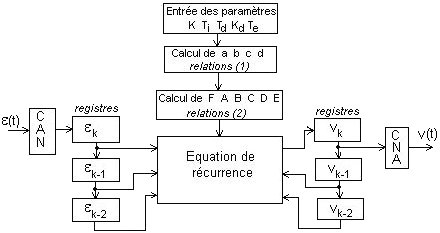
La conception du correcteur P.I.D. programmé est donc la suivante:
Fin du cours
