Ce type de correction est utilisé lorsque la dérivée de la grandeur asservie est une autre grandeur physique que l'on peut mesurer grâce à un second capteur. Disons que ce type de correction se prête bien aux processus de classe 1: s'il y a un intégrateur dans le processus, nous pouvons mesurer la grandeur d'entrée de cet intégrateur.
Exemples: Dans un asservissement de position (en translation ou en rotation) on pourra également mesurer la vitesse (qui est la dérivée de la position).
Dans un asservissement de niveau (hauteur de liquide dans une cuve, équivalent à une pression), on pourra également mesurer la résultante des débits (qui est proportionnelle à la dérivée de la pression donc du niveau). S'il y a un débit entrant et un débit sortant, on pourra utiliser un capteur de débit différentiel.
Dans un asservissement d'exposition lumineuse, on pourra également mesurer l'éclairement (qui est la dérivée de l'exposition).
Mais dans la majorité des asservissements nous ne pouvons pas « capter » la dérivée de la grandeur asservie. La correction tachymétrique n'est donc pas un type de correction généralisable. Cependant elle donne d'excellents résultats.
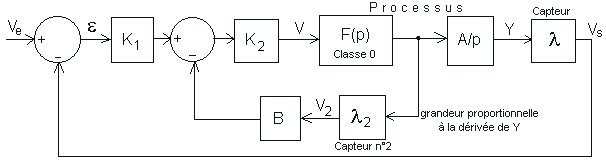
La correction tachymétrique consiste à créer, à l'intérieur de la boucle d'asservissement, une boucle secondaire à partir de la tension de mesure de la grandeur dérivée (par exemple on crée une boucle d'asservissement de vitesse dans la boucle d'asservissement de position), selon le schéma fonctionnel ci-dessous:
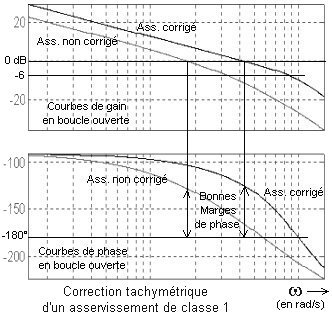
Tout d'abord, sans correction tachymétrique, donc avec B = 0, on règle K2 = 1, puis on recherche la valeur optimale du gain K1 pour avoir un bon amortissement de la boucle (marge de phase de 50°).
Puis on augmente nettement le gain K2 (par exemple K2 = 6,25). Il existe alors une valeur optimale du gain B (dans la chaîne de réaction de la boucle secondaire), qui permet de retrouver un bon amortissement de la boucle principale.
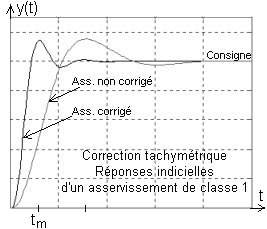
L'asservissement ainsi corrigé aura une erreur de traînage K21/2 fois plus petite et une bande passante K21/2 fois plus grande.
Avec K2 = 6,25 l'asservissement corrigé sera 2,5 fois plus précis et 2,5 fois plus véloce.