On en arrive à la correction spécifique pour obtenir des performances optimales. Cette technique nécessite la connaissance précise de la fonction de transfert en boucle ouverte de l'ensemble ampli-processus-capteur. Soit F(p) cette fonction de transfert.
Grâce au critère de Naslin, nous avons pu obtenir des modèles de fonctions de transfert avec une qualité amortissement parfaite.
Les modèles sont donnés à la page suivante.
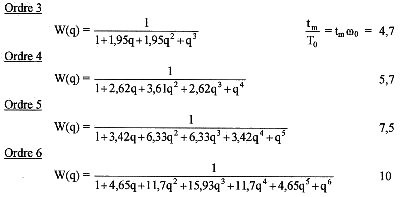
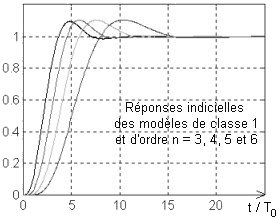
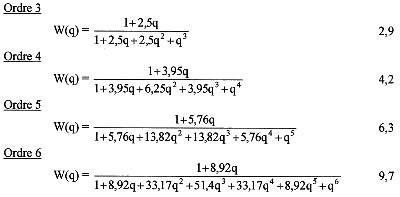
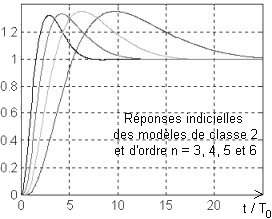
En classe 1 (erreur de position nulle) le dépassement de la réponse indicielle est de 10 %, le temps de réponse est égal à 2,5 fois le temps de montée. En classe 2 (erreurs de position et de traînage nulles), bien que le dépassement soit de 33%, il n'y a pas d'oscillation, le temps de réponse est aussi de 2,5 fois le temps de montée.
Le principe de cette correction est simple: Connaissant la fonction de transfert en boucle ouverte de l'ensemble ampli-processus-capteur, il consiste à calculer la fonction de transfert d'un correcteur réalisable telle que l'asservissement en boucle fermée se comporte comme un modèle choisi (d'où le titre du paragraphe).
On choisit une variable symbolique réduite en posant q = p/w0 = T0p .
Modèles d'asservissement en classe 1
D1 = 10%, D2 négligeable, tR = 2,5tm. |
 |
Modèles d'asservissement en classe 2
D1 = 33%, D2 négligeable, tR = 2,5tm. |
 |
Si F est la fonction de transfert en boucle ouverte de l'ensemble ampli-processus-capteur, et R la fonction de transfert du correcteur, en boucle fermée l'asservissement a une fonction de transfert :
W = R.F/(1 + R.F) .
Si on impose W, on peut alors déterminer R: R.F(1 -W) = W d'où:
R = W/[F(1 - W)] . En posant F = n/d et W = N/D on obtient:
R = N.d / [n(D - N)] .
La dernière question qui se pose est : quel modèle choisir ?.
Il faut choisir un modèle pour W de telle manière que le correcteur R soit réalisable.
Il faut donc que le degré du numérateur de R soit au plus égal à celui du dénominateur. La solution optimale est telle que numérateur et dénominateur de R aient le même degré.
R = N.d / [n(D - N)] donc: degré de N + degré de d = degré de n + degré de D (puisque le degré de N est toujours très inférieur au degré de D) .
On en déduit : degré de D = degré de d - degré de n + degré de N .
Les degrés de n et de d sont connus (on connaît la fonction de transfert F). Le degré de N est déterminé en fonction de la classe d'asservissement qu'on souhaite réaliser : (degré de N) = 0 en classe1 et = 1 en classe 2 (voir les modèles à la page précédente) .
Le degré de D correspond à l'ordre de la fonction de transfert W.
Enfin il reste à choisir le paramètre T0 qui détermine la vélocité de l'asservissement corrigé. En pratique, il faut que ce choix aboutisse à un correcteur où chacun des coefficients qui apparaît au numérateur de la fonction de transfert R(q) ne dépasse pas 20 à 25. Chacun de ces coefficients est matérialisé par un gain dans la réalisation.
La marche à suivre est la suivante:
Après avoir choisi la classe de l'asservissement on en déduit l'ordre du modèle. Le choix du paramètre T0 ne doit pas être utopique (un asservissement ne peut pas être 20 fois plus véloce que le processus en boucle ouverte !).
On transforme alors T(p) en T(q) avec p = q / T0.
Il est alors très facile de trouver la fonction de transfert R(q).
Ce correcteur sera réalisé avec n intégrateurs (1/q = 1/ T0p), des gains et des sommateurs, selon l'un des deux montages vus au chapitre 5 (paragraphe 5.3), à partir de l'un des deux graphes canoniques.
Dans le schéma de réalisation, si le correcteur est de classe 1, un des intégrateurs ne sera pas bouclé, et s'il est de classe 2, deux des intégrateurs ne seront pas bouclés.
