Les allures de ces lieux de Nyquist dépendent tout d'abord de la classe de la fonction de transfert.
Ainsi dans le domaine des basses pulsations le système se comporte comme un gain en position s'il est de classe 0, comme un gain en vitesse (1 intégrateur) s'il est de classe 1, et comme un gain en accélération (2 intégrateurs) s'il est de classe 2.
Ensuite, pour comprendre l'allure du lieu de Nyquist, il faut étudier le comportement du système dans le domaine des hautes pulsations.
Il dépend uniquement des degrés du numérateur (m) et du dénominateur (n) de la fonction de transfert: voir l'expression générale d'une fonction de transfert au début du paragraphe 2.10 .
Ainsi en hautes pulsations le système se comporte comme K.pm/pn c'est-à-dire comme (n-m) intégrateurs.
Bien sûr le gain tend vers 0, mais le déphasage tend vers (n-m) fois (-90°).
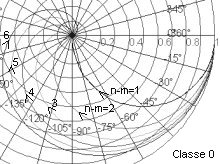
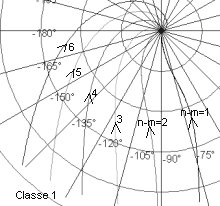
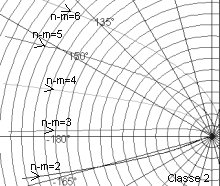
Ci-dessous sont représentés trois séries de six lieux de Nyquist (pour les trois classes 0, 1 et 2) et pour (n-m) variant de 1 à 6 (de 2 à 6 pour la classe 2).
L'intérêt de ces allures de lieux de Nyquist est d'aider à la compréhension de la stabilité des boucles d'asservissements (ceci sera étudié au chapitre 6).
Allure des lieux de Nyquist des systèmes de classe 0, 1 et 2.
 |
 |
 |
En classe 0, le comportement en basses pulsations correspond à un gain statique (constante sur l'axe réel, pas de déphasage). |
En classe 1, le comportement en basses pulsations est celui d'un intégrateur (très grand gain et retard de phase de 90°). |
En classe 2, le comportement en basses pulsations correspond à 2 intégrateurs en cascade (très grand gain et retard de phase de 180°). |
En hautes pulsations le comportement est indépendant de la classe de T(p). Le système se comporte comme (n-m) intégrateurs: gain tendant vers 0 mais avec un retard de phase de (n-m)90°.
Fin du chapitre 4
Dans le chapitre 5 (dernier chapitre avant d'aborder la boucle d'asservissement), nous allons étudier la représentation des fonctions de transfert et en particulier nous allons nous familiariser avec les graphes de transfert.
