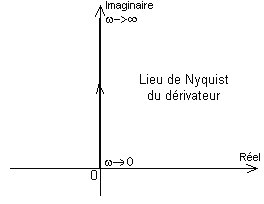
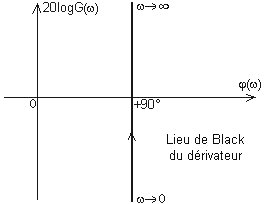
T(p) = p T(jw) = jw C'est un imaginaire pur: çT(jw)ç = w et ^T(jw) = + 90°.
|
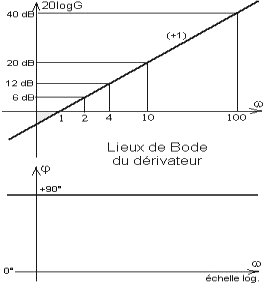
Lieux de Bode:
La courbe de gain est une droite de pente (+1), sachant que l'unité de pente est égale à 20 dB par décade (rapport 10 en pulsation). En effet 20log10 = 20 dB.
Si on prend un écart de pulsation d'une octave (rapport 2), une pente (+1) montre une variation de gain de 20log2 @ 6 dB.
Pour tracer cette droite il est commode de prendre un écart de pulsation de deux octaves (rapport 4) et de reporter une variation de gain de 12 dB.
La courbe de phase est une constante (+90°) puisque le nombre complexe T(jw) est un imaginaire pur.
|
 |