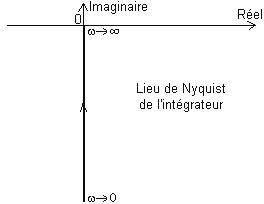
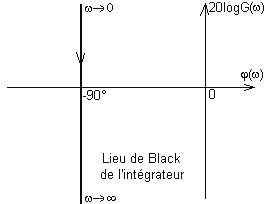
T(p) = 1/p T(jw) = 1/ jw C'est un imaginaire pur: çT(jw)ç = 1/w et ^T(jw) = - 90°.
|
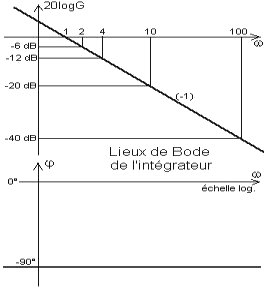
Lieux de Bode:
La courbe de gain est une droite de pente (-1), c.à.d. - 20 dB / décade = - 6dB / octave.
Pour tracer cette droite il est commode de prendre un écart de pulsation de deux octaves (rapport 4) et de reporter une variation de gain de - 12 dB.
La courbe de phase est une constante (- 90°) puisque le nombre complexe T(jw) est un imaginaire pur négatif.
|
|