Tout
polynôme à
coefficients réels peut se décomposer en produits de
monômes (ordre 1) et de trinômes (ordre 2),
à
coefficients réels.
Ce
théorème
classique de mathématiques montre l'importance majeure de la
bonne connaissance des propriétés des systèmes
des premier et second ordre.
Le
changement radical
entre premier et second ordre est l'apparition possible de pôles
complexes conjugués. De tels pôles peuvent conférer
à un système linéaire un comportement
oscillatoire (amorti, souhaitons le...).
3.3.a Amortissement
ou fréquence de
coupure : un compromis
La
fonction de
transfert (rappelons qu'il s'agit ici du produit G*H)
d'un système du second ordre peut être écrite,
sous la classique forme canonique qui fait intervenir une pulsation
de coupure, ω0
, et un coefficient d'amortissement m :
Les
calculs du paragraphe 2.3.b s'appliquent évidemment sans
difficulté, ils conduisent au résultat majeurs
suivants :
Le
produit m*ω0
est le paramètre invariant du système.
Le
coefficient
d'amortissement m est divisé par  :
:
 .
.
La
pulsation de coupure
est multipliée par le même facteur :  .
.
Ce
résultat est
d'une importance capitale : il montre qu'un système du
second ordre peut devenir très largement sous amorti en boucle
fermée, c'est à dire que le contrôle en boucle
fermée peut conduire, dès le second ordre, à un
comportement oscillatoire amorti.
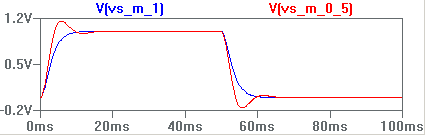
Rappelons
ici qu'un amortissement convenable de la réponse transitoire
d'un système suppose que le coefficient d'amortissement reste
proche de 1, typiquement compris entre 0,5 et 1 :
3.3.b Lieu des
pôles
Le
comportement d'un
système du second ordre, déterminé par ses
pôles, se calcule aisément sous forme analytique. En
fonction des deux paramètres canoniques w0
et m, les pôles
sont donnés par :
Quand
le gain de boucle
(T0) augmente, le
coefficient d'amortissement en boucle fermée peut devenir
inférieur à 1. Les racines sont alors complexes
conjuguées :
Au
delà de cette
valeur critique de T0 ,
la partie réelle des pôles est indépendante de T0
, seule la partie imaginaire augmente quand T0
augmente.
Le
lieu des pôles
(ou lieu d'Evans) est un ensemble de courbes, dans le plan complexe
des p (variable de Laplace),
qui représente l'évolution des pôles quand T0
varie.
Par
exemple, pour un
système du second ordre ayant deux pôles réels
négatifs en boucle ouverte, on obtient un lieu du style :
Quand
|m| < 1 on peut
remarquer que |m| représente
le cosinus de l'angle phi
fait par le rayon vecteur d'un pôle complexe et l'axe des
réels
(voir figure).