Le
seul paramètre
dynamique d'un système passe bas du premier ordre est, en
analyse harmonique, sa fréquence de coupure, ou en analyse
temporelle, sa constante de temps :

Si
la chaîne de retour est réelle, de gain constant H,
T0 = G0*H,
où G0 est le
gain statique de la chaîne directe. La fonction de transfert en
boucle fermée peut alors s'écrire :

Dans
cette expression T0bf
représente le gain statique du système en boucle
fermée
(qui peut également s'écrire en fonction des
paramètres
de la chaîne directe et de la chaîne de retour :
T0bf = G0/(1+G0*H)).
Il
est souvent commode
d'introduire comme paramètre dynamique la pulsation (ou la
fréquence, en hertz) de transition,
qui est la pulsation que l'on obtiendrait dans un montage
« suiveur » : fT = f0
*G0.
3.1.a
Fréquence de coupure
L'application
immédiate
des formules précédentes conduit à la règle
dite du
« produit gain bande constant ».
Un
système passe
bas du premier ordre, contrôlé par une chaîne de
retour réelle, voit sa bande passante élargie dans le
même rapport que la chute de gain entre la chaîne directe
et la boucle fermée.
Par
exemple :
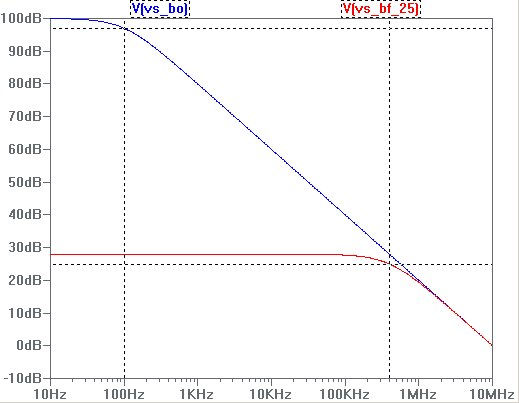
Un
amplificateur
opérationnel, assimilable à un système passe bas
du premier ordre, a un gain statique G0 = 105
et une fréquence de coupure en boucle ouverte f0 = 100 Hz.
On utilise cet amplificateur pour réaliser un gain en boucle
fermée égal à T0bf = 25.
Le
gain a chuté
d'un facteur 4000, la fréquence de coupure du montage est donc
la fréquence de coupure en boucle ouverte de l'amplificateur
opérationnel multipliée par 4000, soit 400 kHz.
Une
autre façon
d'obtenir le même résultat est de dire que la
fréquence
de transition de l'amplificateur opérationnel est de 10MHz, un
gain en boucle fermée de 25 conduit à diviser cette
fréquence de transition par 25, ce qui conduit évidemment
au même résultat.
La
construction
classique, dans le plan de Bode, du graphique ci-dessus illustre
cette propriété.
En
haute fréquence, le diagramme de Bode de la fonction de
transfert en boucle fermée rejoint celui de la fonction de
transfert en boucle ouverte (cette propriété est
indépendante de l'ordre du système), ce qui conduit,
pour un système du premier ordre, à un produit
gain*bande passante identique pour toutes les valeurs de gains en
boucle fermée. Ce produit est donc un bon paramètre du
système.
3.1.b Temps de
réponse
Le
temps de montée,
défini dans une réponse à un échelon
comme le temps mis pour passer de 10% à 90% de la valeur
finale, est relié à la bande passante du système
en régime harmonique par la relation :
tr = 2,2*τ = 0,35/f0
Pour
un système
du premier ordre, l'élargissement de la bande passante
correspond donc à une diminution du temps de montée
dans le même rapport.
Il
est à noter
que toutes ces propriétés supposent que le système
est linéaire. L'analyse complète de ce qui se passe
réellement dans un système en régime dynamique,
surtout dans des réponses transitoires
« brutales »
comme la réponse à un échelon, montre que
très
souvent le système ne reste pas en régime linéaire
pendant le régime transitoire. Dans le cas des amplificateurs
opérationnels, par exemple, dès que l'amplitude d'un
échelon est importante, le temps de montée est en
réalité limité par la vitesse de balayage de
l'amplificateur (slew rate), paramètre non
linéaire
qui n'est pas modifié par une boucle de contrôle. Des
effets du même genre existent dans les commandes de moteurs, ne
serait-ce que pour des questions de sécurité, faire
démarrer un système mécanique trop rapidement
peut devenir destructif.
