Comme pour les systèmes continus,
nous « échappons » à la convolution discrète.
Transformation inverse
Dans le domaine continu, la fonction
de transfert associée aux transformées de Laplace des signaux d’entrée et de
sortie permet d’écrire une équation différentielle linéaire à coefficients
constants. Dans le domaine discret, nous écrivons l’équation récurrente reliant
les échantillons d’entrée et de sortie à partir du transfert en z.
Supposons avoir la forme de transfert
canonique causale suivante : .
En écrivant les transformées en z
des signaux d’entrée et sortie et , en faisant le produit en croix et en
identifiant dans les deux membres les coefficients multiplicateurs de la même
puissance de z (même instant d’échantillonnage) , nous trouvons
l’équation récurrente de ce système numérique à l’instant :
avec deux
équations pour l’initialisation : et
Remarques : L’initialisation peut
permettre l’introduction de conditions initiales. Nous pouvons noter aussi que
la transformation inverse contrairement au domaine continu est indépendante de
la nature du signal d’entrée. Pour trouver les échantillons de sortie, il
suffit de connaître les échantillons d’entrée qui peuvent correspondre à un
signal échantillonné quelconque.
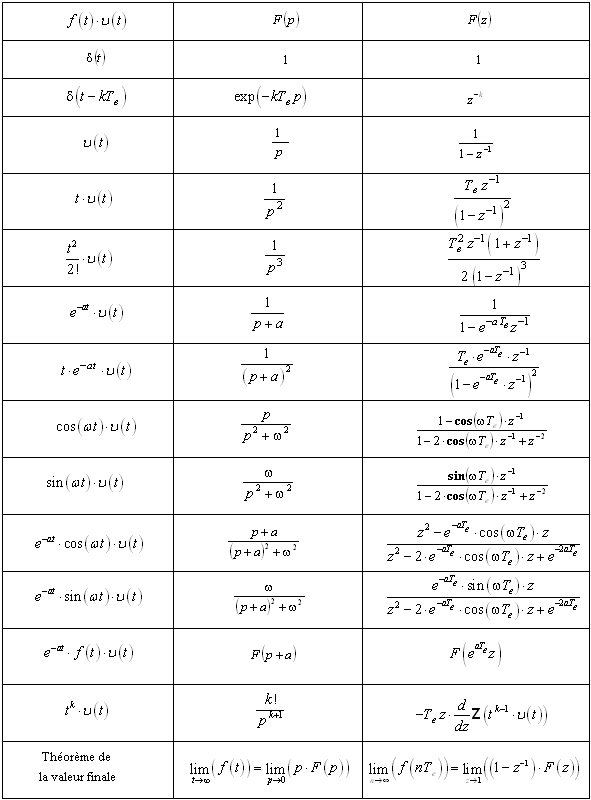
Tableau des transformées de Laplace des fonctions continues et échantillonnées