Comme pour les systèmes continus la
précision dépend de la nature du signal de consigne ici connu par ses échantillons.
Nous limitons la présentation à l’étude de la précision vis à vis de la
consigne.
En posant ,
la transformée en z de l’erreur vaut : .
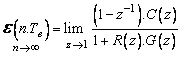
Nous pouvons à partir d’une nature de consigne fixée appliquer le théorème de
la valeur finale.
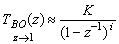
En mettant la fonction de transfert sous la forme qui fait
apparaître les pôles et les zéros :
avec i le nombre de
pôles (effets d’intégration numérique et pour
assurer la causalité.
Nous posons avec K gain
de boucle.
Consigne échelon
unité ou erreur de position :
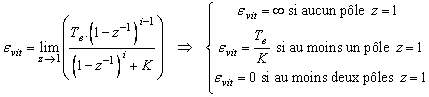
Consigne rampe de
vitesse unité ou erreur de vitesse :
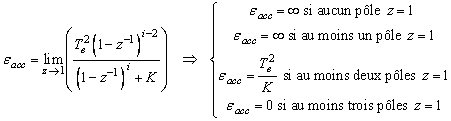
Consigne rampe en
accélération ou erreur d’accélération :
Les résultats semblent dépendre de la
période d’échantillonnage, cela peut paraître curieux mais attention le gain du
système dépend des coefficients en z qui sont aussi fonction de la
période d’échantillonnage.
Les
conclusions sont les mêmes que celles d’un système continu concernant le
compromis stabilité-précision. Une petite nouveauté tout de même est que la
période d’échantillonnage est un paramètre de réglage complémentaire qui peut
permettre d’espérer obtenir plus de degrés de liberté en analyse et synthèse de
boucle.