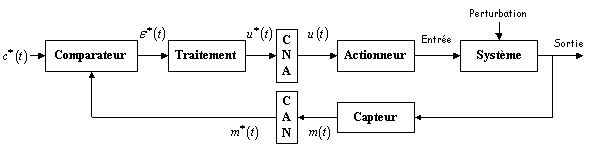
La figure ci-dessous présente un
exemple de structure de boucle échantillonnée. Nous remarquons l’introduction
des interfaces CAN et CNA qui imposent le choix d’une période d’échantillonnage

.
Problèmes à résoudre
- Echantillonnage
d’un signal continu
Cette opération
correspond à une prise d’échantillons à la cadence de la période
d’échantillonnage. Cela conduit à faire la remarque que seules les informations
obtenues aux instants d’échantillonnage sont « vues » par le
calculateur. Un signal continu  devient un signal échantillonné
devient un signal échantillonné
 .
.
- Conversion analogique-numérique
Les convertisseurs
utilisés permettent le passage d’une grandeur analogique (le plus souvent
tension) en une valeur numérique. La valeur numérique que nous utilisons sera la
valeur numérique image directe de la grandeur analogique. A l’instant  , l’échantillon k est noté
, l’échantillon k est noté  .
.
- Conversion numérique-analogique
L’opération est l’inverse de la
précédente. Nous devons alors reconstituer une continuité de signal pendant une
période d’échantillonnage à partir de l’échantillon numérique fourni mais aussi
dans certain cas construit en s’appuyant sur d’autres échantillons le
précédant.
- Synthèse de
l’algorithme de commande
Nous devons mettre en place
une théorie qui permet de définir la loi de commande au sens numérique du terme
pour se substituer ou faire mieux que le correcteur ou le régulateur analogique
définis dans les approches systèmes continus.