Définition : Le rôle d’un
bloqueur est de définir un signal continu entre deux échantillons successifs
pendant la durée d’une période d’échantillonnage. Le type de bloqueur est
fonction soit du nombre d’échantillons (les plus courants ordre 0 ou ordre 1)
ou de la forme du signal continu reconstitué (exponentielle par exemple). Nous
utilisons pour la suite que des bloqueurs d’ordre 0.
Transfert d’un bloqueur d’ordre
0 :
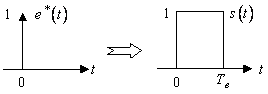
L’entrée est un train d’impulsions,
sa réponse impulsionnelle peut donc être tracée :