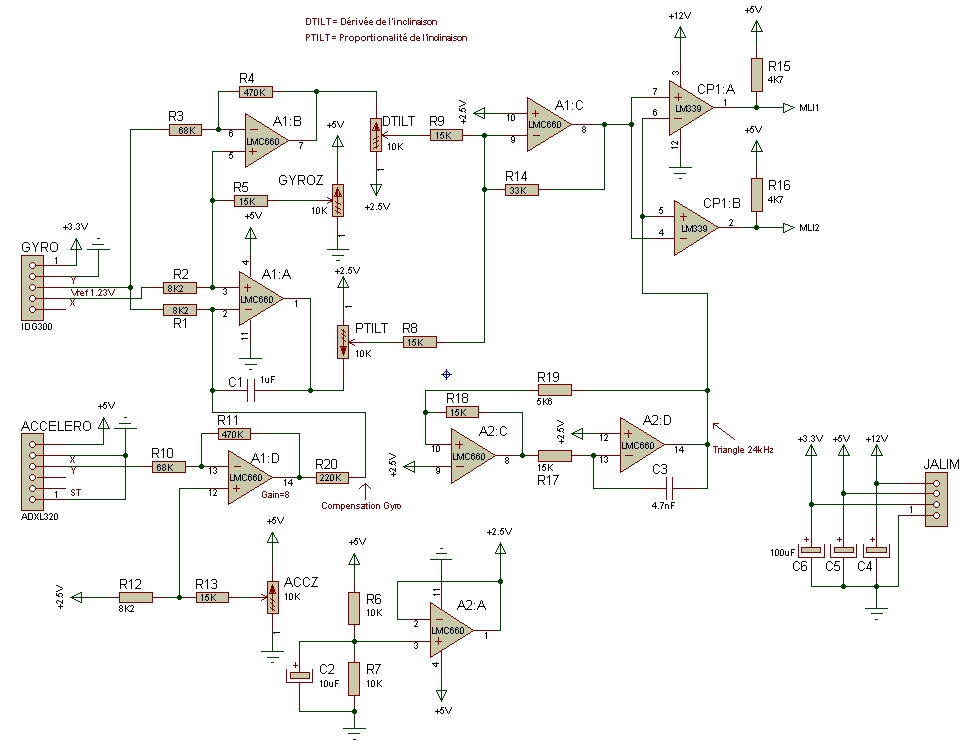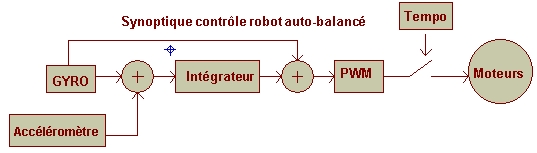
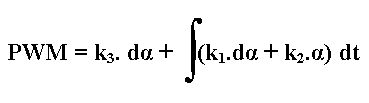
La commande
en PWM ( Pulse Width Modulation ) des moteurs est issue
de l'équation ci-dessus.
(Alpha représente l'angle d'inclinaison de la plate-forme)
PWM est l'acronyme anglais pour MLI (Modulation en Largeur
d'Impulsion).
Les constantes k1 , k2 et k3 sont réglées empiriquement
pour assurer une bonne stabilité de l'ensemble.
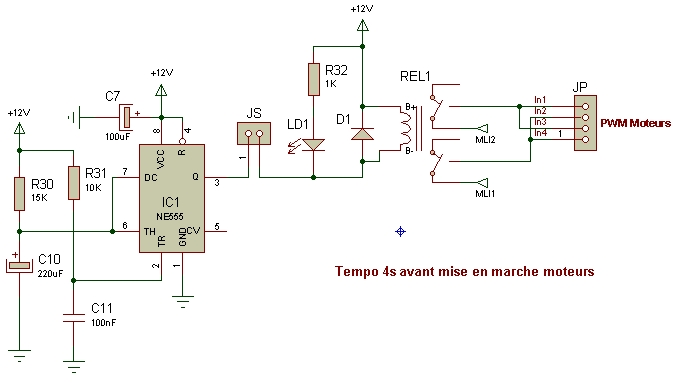
Une temporisation
donne le temps à l'électronique de s'établir et évite les
mouvements intempestifs du robot à la mise sous tension.
L'équation d'asservissement est implémentée en composants
analogiques.
Ce choix
est délibéré. Il permet une approche pédagogique intéressante
des fonctions en électronique analogique.