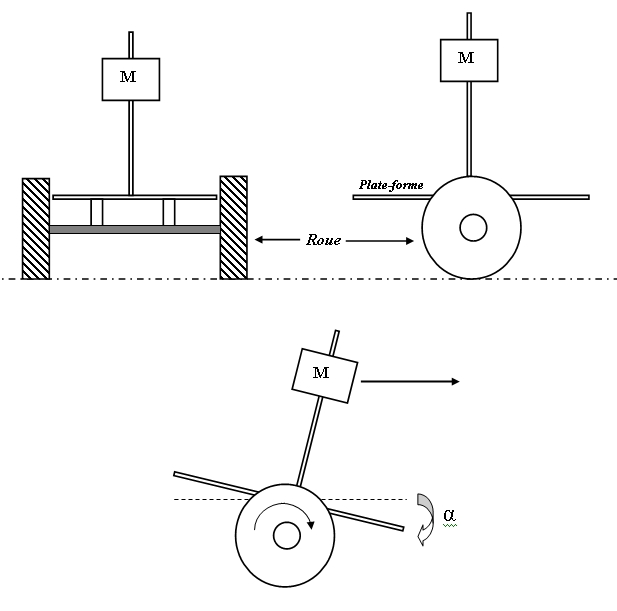
Si le dispositif
réagit suffisamment vite, l'angle est en permanence proche
de zéro.
La plate-forme est donc toujours horizontale et l'utilisateur
n'est pas obligé de maintenir son équilibre.
Un déplacement du centre de gravité vers l'avant obligera
le robot à se déplacer dans le même sens pour maintenir
l'équilibre.
Ceci est valable dans les deux sens de déplacement.