|
|
|
|
Accueil du module « Robot Auto-Balancé: Segway »
|
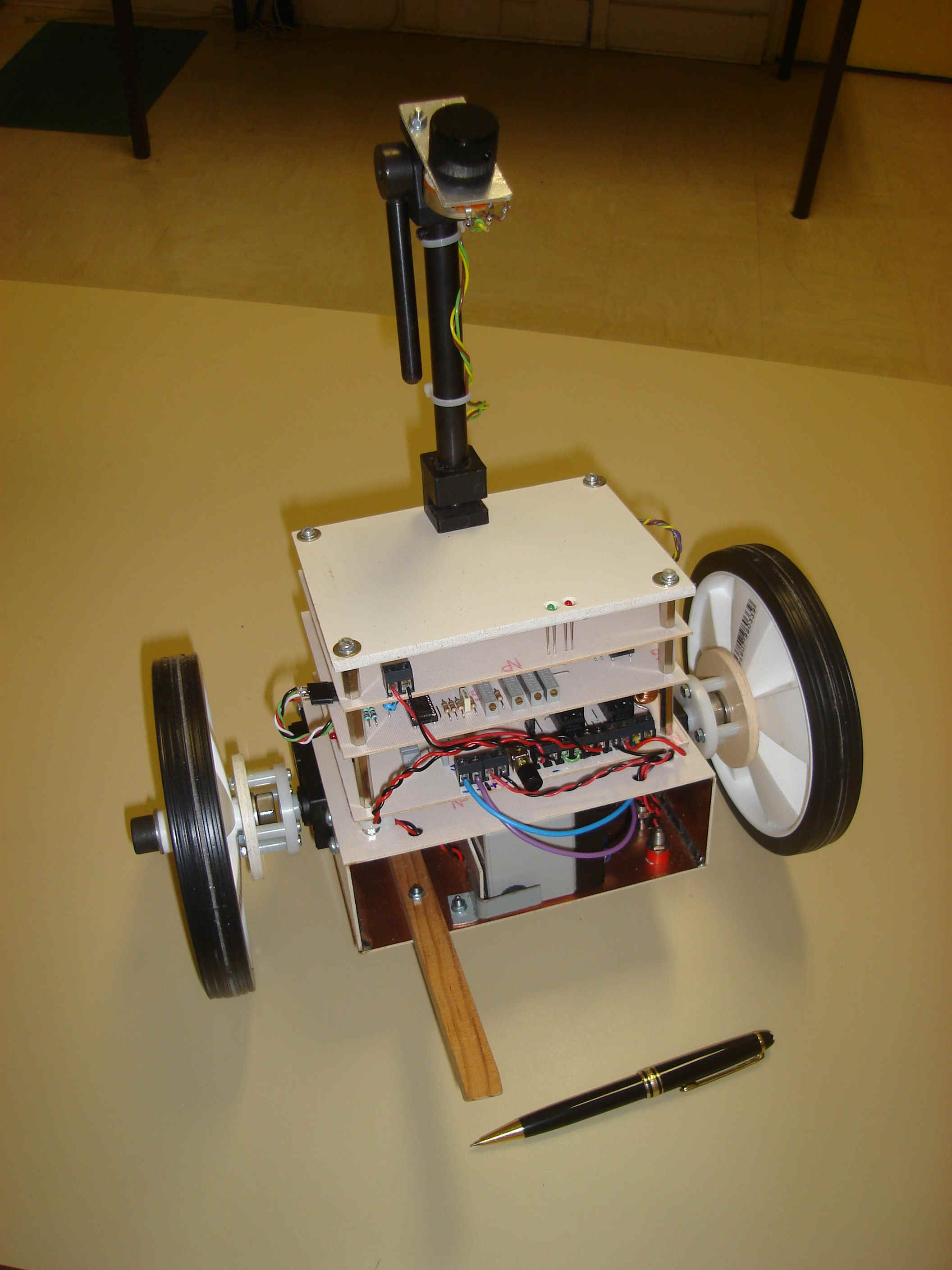
Le segway
est un véhicule électrique monoplace, aussi appelé gyropode,
constitué d'une plate-forme équipée de deux roues sur un
essieu perpendiculaire à l'axe de déplacement.
Il dispose d'un système de stabilisation gyroscopique qui permet
à l'utilisateur, au travers d'un manche vertical, de se déplacer
sans être obligé d'assurer son équilibre. |
|
|
|
|
L'objectif
de cette étude, est de réaliser un modèle réduit du segway.
|
|
|
|
|