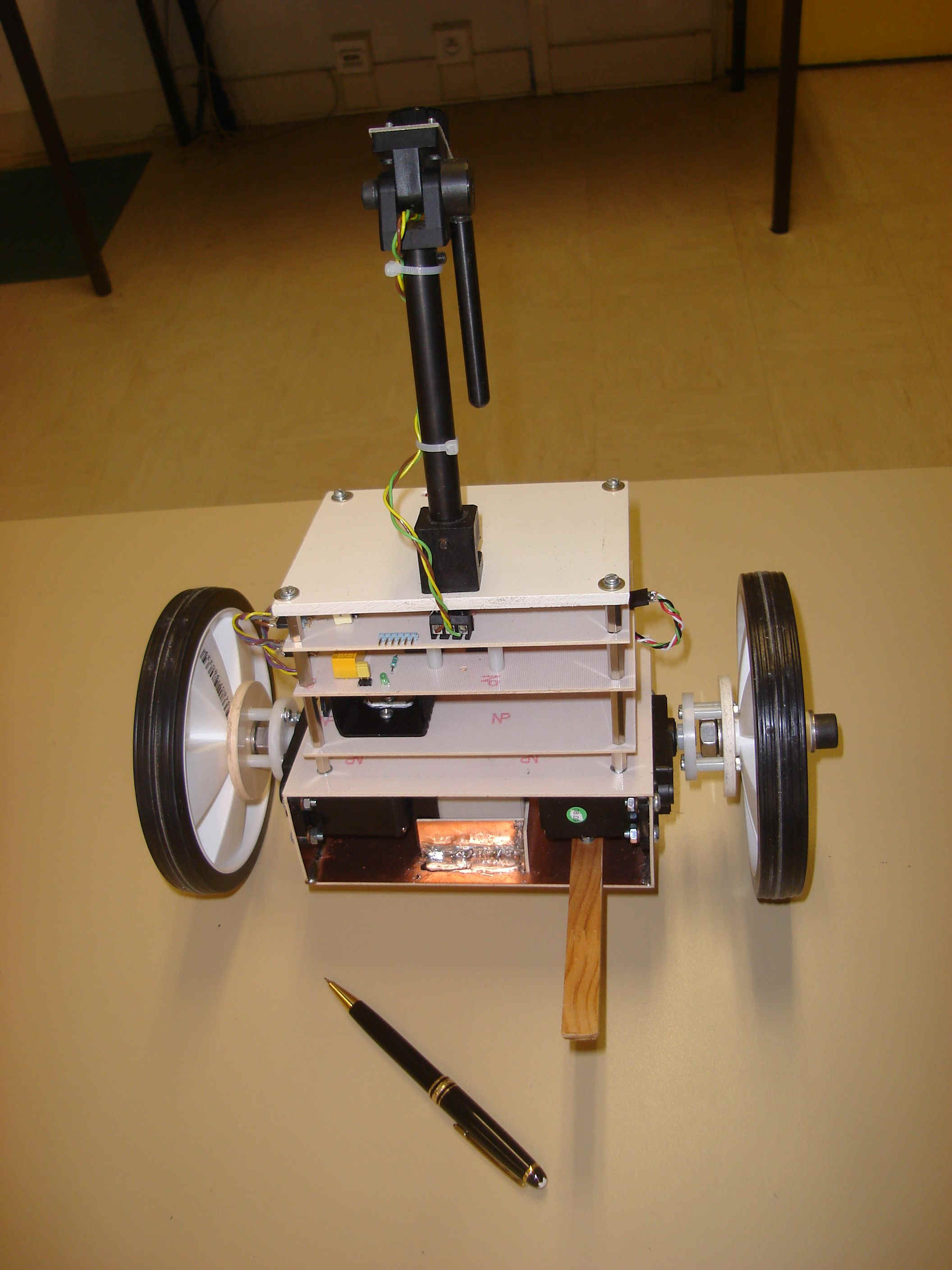
Le gyropode est constitué
d'un corps contenant la batterie et les moteurs, surmonté
des différentes cartes électroniques.
|
Le manche de pilotage n'est
pas articulé comme sur un véritable segway.
Il est équipé d'un potentiomètre de virage ou de deux interrupteurs.
Le potentiomètre permet un virage proportionnel.
Les deux interrupteurs bloquent une ou l'autre des roues.

|
Le corps
du robot est réalisé en circuit imprimé simple face soudé.
Cette façon de faire est certes un peu chère mais permet
d'obtenir les dimensions 155mm x 50mm x 120mm souhaitées.
Ces dimensions
permettent de placer les deux moteurs
et une batterie de 12V.
|
La batterie est placée de
telle sorte que le centre de gravité soit en dessous de
l'axe des roues, afin d'assurer un équilibrage naturel du
robot au repos.
Par la suite, le centre de gravité du robot sera placé bien
au-dessus, puisqu'il est sensé transporter une charge (homme).

|
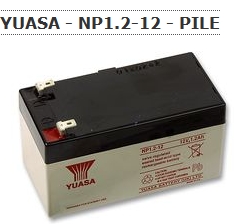
La batterie
de 12V a une capacité de 1.2Ah.
L = 95mm
l = 45mm H = 50mm
|
Il est indispensable
d'utiliser des moteurs précis avec trés peu de jeu dans
les engrenages.
Le gyropode ne pourra assurer une bonne stabilité qu'en
l'absence de jeu mécanique.
Dans le cas contraire l'équilibre parfait ne pourra être
obtenu.
Le bloque
moteur est issu d'un servomoteur de modélisme HS-805.
Ce servomoteur, a été choisi plus pour la solidité de son
axe et la précision de ses engrenages, que pour son couple
surdimensionné.
Il est nécessaire de modifier ce servomoteur, prévu pour
ne faire qu'un tour, en moteur.
Cela peut paraître dommageable, mais c'est la solution la
plus efficace pour obtenir un moteur réducté de faibles
dimensions, précis, de qualité et d'un coût relativement
faible.
La transformation du servomoteur en moteur est simple, mais
demande du soin.
Après démontage des six vis arrières du servo, il faut enlever
le circuit imprimé soudé sur les deux pattes d'alimentation
du moteur.
Puis démonter le potentiomètre solidaire de l'axe du servo
et enfin, limer l'ergot de blocage un tour sur le pignon
de sortie de l'engrenage.
Les engrenages doivent tourner librement.
Souder les deux fils (rouge noir) sur les pattes d'alimentation
du moteur, refermer et le tour est joué.

|
Les roues se trouvent très
facilement dans les magasins de bricolage à prix très faible.
Diamètre roue = 145mm
Diamètre axe = 10mm
Diamètre flasque = 55mm

|
L'accouplement du moteur
et de la roue est assuré par un flasque
relié par des entretoises à la couronne du moteur.
Ces flasques sont découpés à la scie-cloche dans du PVC.
La roue elle même est fixée par un boulon de diamètre 10mm
sur le flasque.

|
L'électronique
est constituée de trois cartes superposées.
- Une carte capteurs (gyroscope et accéléromètre)
- Une carte virage PIC 18F2420
- Une carte puissance et alim.
Il est évident que ces trois cartes pourraient être regroupées
en une seule.
Toutefois, dans un cadre pédagogique, il est préférable
de décomposer la réalisation en sous-ensembles.
|
