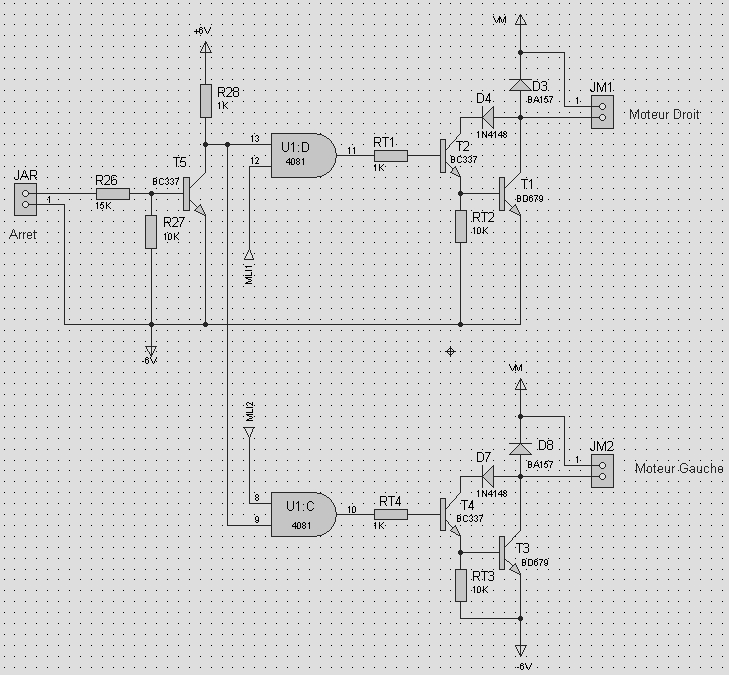
Les
deux signaux MLI1 et MLI2 sont appliqués à deux étages de puissance (T1 et T3)
capables de fournir le courant nécessaire aux deux moteurs.
Il est toutefois indispensable de pouvoir arrêter le robot en cas de détection
d'obstacle.
C'est le rôle des portes "ET" U1:D et U1:C.
Le connecteur JAR recevra la sortie du détecteur d'obstacle décrit plus loin.
|
