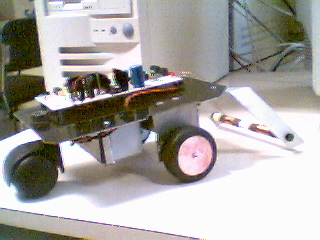
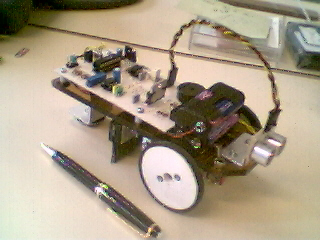
Le tripode
s'avère la solution mécanique la plus simple à mettre en œuvre.
Deux moteurs à courant continu accouplés à deux roues par l'intermédiaire de pignons
de réduction , assurent la traction
et la direction du robot.
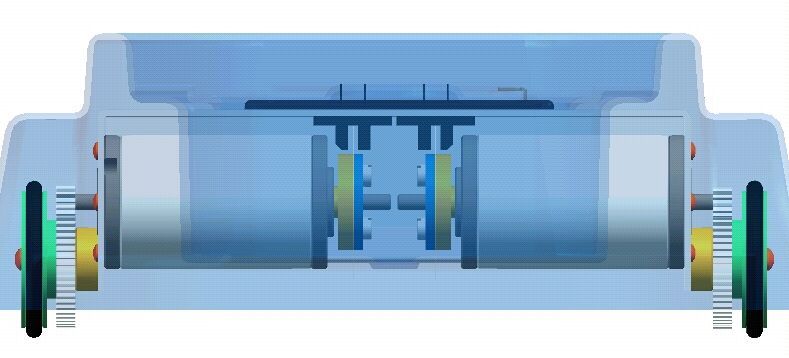
La stabilité est assurée par une roue folle située à l'arrière.
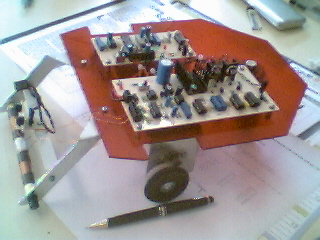
La batterie est fixée sous le châssis du robot, ce qui libère de la place pour
l'électronique.
Les bobines de détection sont fixées à l'avant du robot à 20cm de l'axe des roues.
D'autres morphologies de robot peuvent être envisagées.
Les deux roues motrices indépendantes permettent de diriger facilement le robot en
faisant varier
la vitesse d'une des deux roues par rapport à l'autre.

|
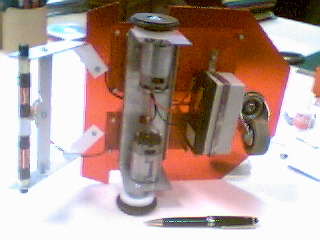
Une autre solution consiste à utiliser des servomoteurs
de radiomodèlisme en guise de groupes moto-propulseurs.
Après les avoir modifiés pour permettre à l'axe de rotation
d'effectuer plus d'un tour, ceux-ci représentent une alternative
intéressante et compacte.
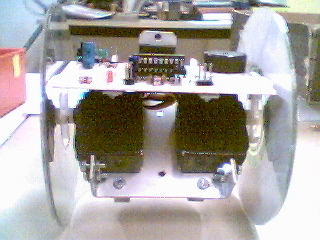
L'électronique
interne au servomoteur n'est pas utilisée
dans ce cas.
|

|
 |
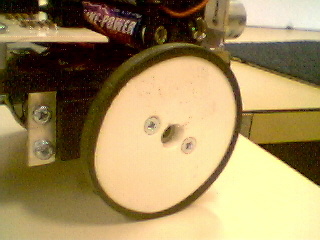
Des
rondelles de PVC entourées d'une bande de chambre à air
font office de roues. |
|
Des CD usagés montés sur l'axe des servomoteurs
représentent une solution originale. |