Emetteur/Récepteur IR:
Un
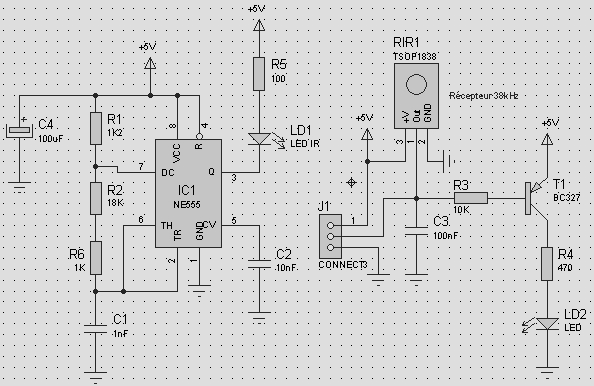
oscillateur à base de NE555 calé sur 38KHz
permet, à l'aide d'une Led IR (LD1), l'émission continue d'un faisceau de lumière IR.
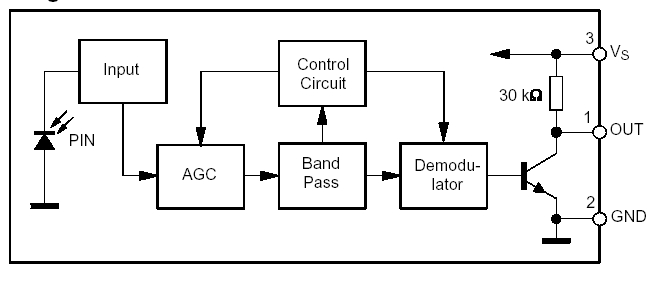
En présence d'un obstacle, ce faisceau est réfléchi vers le module récepteur TSOP1838.
Une led rouge (LD2) matérialise cette détection.
Contrairement
au détecteur à ultrasons vu précédemment, ce détecteur infrarouge
n'est pas sensible aux type de matériaux mais à la couleur de celui-ci.
Une cible de couleur sombre sera beaucoup moins réfléchissante qu'une surface claire.
La distance maximale de détection sera donc fonction de la couleur de la cible.
|