Le
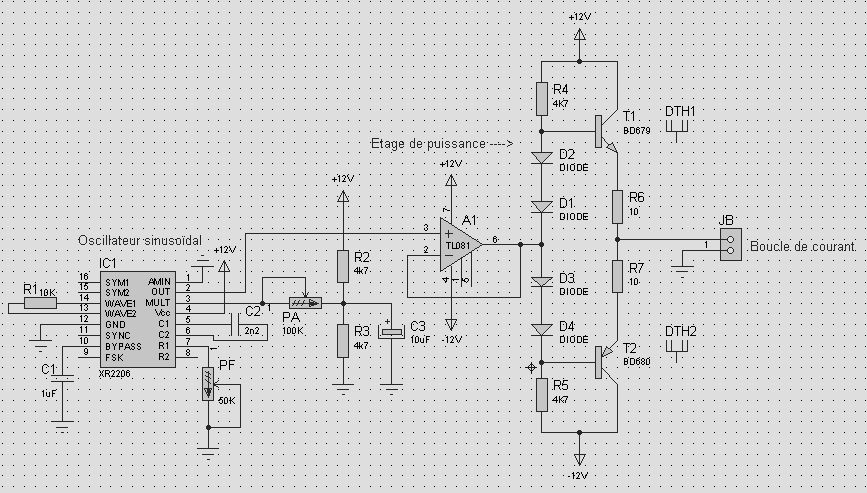
générateur de boucle est conçu autour d'un circuit spécialisé XR2206 en mode sinus.
Un étage de puissance "Push-Pull" assure l'interface avec la boucle de courant.
Un courant de 1A s'avère suffisant dans la plupart des cas.
La fréquence du signal
sinusoïdal est réglée ici à 33KHz et peut être ajustée par le potentiomètre PF.
L'amplitude du signal est, quant à elle, ajustée par le potentiomètre PA.
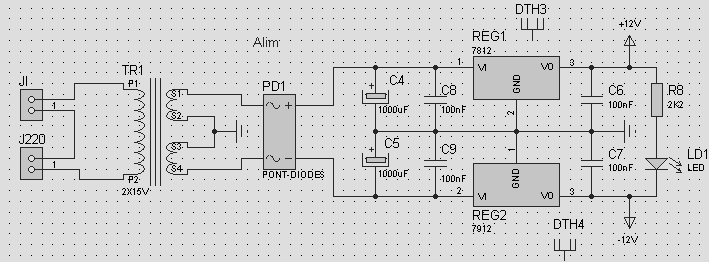
Une alimentation +12V/-12V se charge d'alimenter l'ensemble.
La puissance totale est d'environ 24W; il est donc nécessaire de prévoir des
dissipateurs thermiques
sur les régulateurs REG1 et REG2 ainsi que sur les transistors T1 et T2 de l'étage
de puissance.
Si le site comporte plusieurs boucles, il faudra réaliser autant de générateurs que de
boucles.
Chaque générateur aura, dans ce cas, une fréquence différente.
Les sinusoïdes ne sont pas parfaites et leur spectre peut comporter des harmoniques non
nulles.
Il faut veiller à ce que ces éventuelles harmoniques ne correspondent pas à une
fréquence d'une autre boucle.
Par exemple: F1 = 20kHz, F2 = 33kHz, F3 = 50kHz, F4 = 75kHz etc.....
Comme nous l'avons vu précédemment, l'énergie reçue par les capteurs magnétiques du
robot, dépend de la fréquence.
Pour obtenir un suivi identique du robot sur chaque boucle, il est nécessaire d'adapter
le générateur en fonction de la fréquence.
Le courant dans chaque boucle doit être inversement proportionnel à la fréquence.
Ceci est obtenu en modifiant la valeur de la résistance de boucle (R6,R7) ou,
plus simplement, en adaptant l'amplitude de la sinusoïde (PA).
Pour une fréquence de 33KHz, un courant de 1A dans la boucle
permet un suivi correct avec les capteurs utilisés dans notre application. |