L'électronique
de notre robot est réalisée à l'aide d'ampli. opérationnels qui nécessitent une
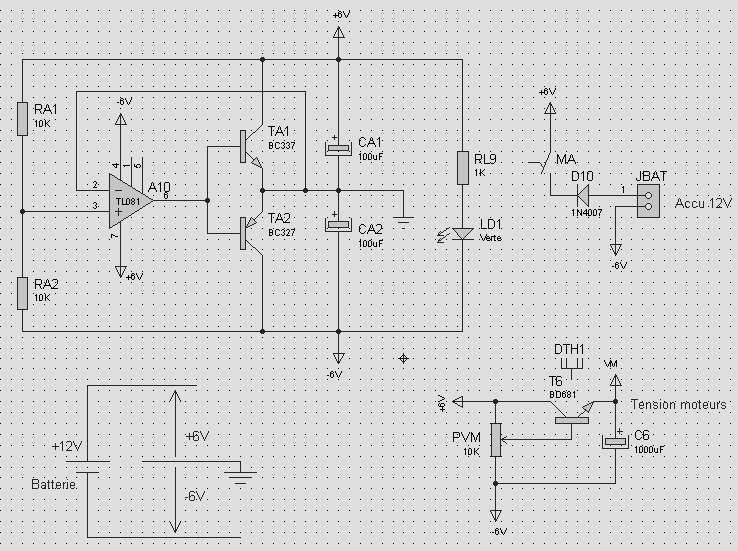
alimentation symétrique.
L'énergie du robot est fournie par une batterie de 12V/1.2Ah.
Le montage centré sur A10 et TA1 et TA2 permet de réaliser un potentiel flottant
"masse virtuelle"
situé à +6V par rapport au zéro de la batterie.
Nous disposons dès lors
d'une alimentation symétrique +6V/-6V par rapport à cette masse virtuelle..
|
