3.6.2. Les Entrées de Comptage
Carte
d'Interface et Capteurs
de positionsLes Entrées de
Comptage
Cette solution
consiste à utiliser un compteur de l'automate dont la valeur
sera
proportionnelle à un angle. Pour cela nous avons monté
une roue dentelée
qui passe à travers un capteur optique. Ce capteur est
constitué d'un
émetteur infra-rouge et d'un récepteur
photo-électrique.
Lorsqu'une dent de la roue est devant l'émetteur, celle-ci
empêche
l'onde lumineuse d'arrivée au récepteur , ce qui nous
délivre un 0.
Inversement, lorsque l'émetteur n'est pas caché, le
signal
arrive jusqu'au récepteur qui enverra un 1.
Le schéma ci-dessous représente la mise en
forme des signaux pour obtenir sur une entrée Tout Ou Rien de
l'automate le 0 (0V), et le 1 (24V). Nous
avons placé ce capteur sur l'épaule du bras. Lorsque
l'épaule bouge, l'IPC reçoit une suite d'impulsions qu'il
suffit de compter pour avoir une approximation de la position angulaire
de l'épaule.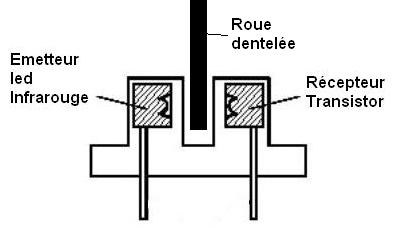 | 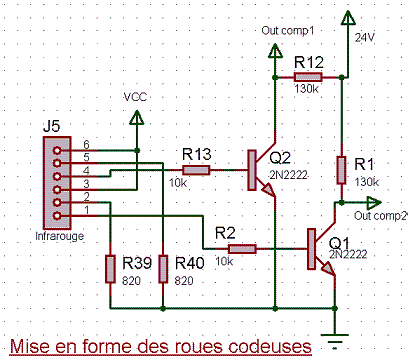 | | Capteur optique | |
|
|
