Pour aider aux manœuvres, on
trouve de plus en plus d’appareils d’assistance
appelés radar de recul. On propose d’en étudier un,
réalisé à base de CPLD dont le contenu sera
programmé en exploitant le langage Verilog. L'appareil
génére un son, image de la distance entre notre appareil
et un objet ou obstacle. Ce son devient de plus en plus aigu au fur et
à mesure que l’on se rapproche.

Pour cela, on utilisera les ultrasons. Le principe est simple, on
émet une impulsion très courte à l’aide
d’un transducteur ultrasonique et on récupère son
écho (le signal impulsionnel réfléchi par un
objet). On récupère à l’entrée de
notre appareil les 2 signaux (Emit et Recept) porteurs
d’impulsions décalées dans le temps. Emit est
l’impulsion de départ et Recept représente son
écho par l’objet.
La vitesse de propagation des sons est d’environ
300m/s dans l’air. L’écart de temps entre
Emit et Recept dépend de la distance. L’onde
faisant un aller et retour entre notre véhicule et
l’obstacle. On a par exemple pour une distance de
5 cm un retard de 333 µs ou pour 50 cm de 3333 µs.
Notre appareil devra générer
dans un haut-parleur (HP), un son de fréquence dépendante
de cette durée. La fréquence sera dans la
gamme des fréquences audibles.
On envoie une impulsion chaque 2/10 de seconde
(cette information n’intervient pas sur notre étude).
Le dispositif de génération des impulsions
et de mise en forme de la réception n’est pas
l’objet du projet.
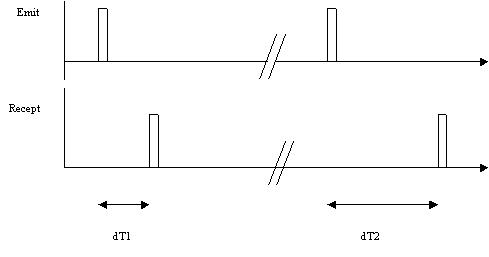
Remarques :
- à gauche, un obstacle est plus proche de notre radar que
sur la partie droite (dT1 est plus petit que dT2). Le signal
généré devra donc être plus aigu
à gauche,
- on dispose, en plus des 2 signaux, d’une horloge de fréquence 1MHz.
La compréhension complète
de la présentation n’est pas nécessaire à la
réalisation du programme. Les explications qui suivent peuvent
à elles seules suffire pour réaliser la tâche.
Le dispositif doit être
opérationnel à partir d’un mètre
jusqu’au contact. Si dT dépasse 6666,
le haut parleur n’est pas piloté. La fréquence
générée sera inversement proportionnelle
à la distance (la période sera donc proportionnelle).
On demande d’imaginer un dispositif
qui génère un signal de période proportionnelle
à la distance, qui soit tel que l’on ait
3kHz sur le haut-parleur pour 333µs (dT = 333).
Remarques :
- l’entrée d’horloge sera appelée
Horl et fonctionnera à 1MHz,
- la sortie sera appelée HP.
