La définition de la stabilité est la
même que celle utilisée pour les systèmes continus : un système est stable
si écarté de sa position d’équilibre, il revient à cette position en régime
permanent. Une conclusion dans le domaine
continu, nous a conduit à dire qu’un système est stable si tous ses pôles sont
à partie réelle strictement négative d’où la région stable qui correspond au
demi-plan complexe de gauche strictement. Soit un pôle dans le domaine continu, le
changement de variable pour les systèmes échantillonnés est d’où . La condition à respecter ne
porte que sur le module : .
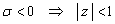
Conclusion : un système échantillonné
est stable si tous ses pôles sont strictement à l’intérieur du cercle unité du
plan complexe (,), c’est le domaine de
stabilité absolue pour un système échantillonné. Pour définir un domaine de stabilité
relative, nous imposons une certaine qualité d’amortissement :
pôles
réels continus: forme canonique
d’où la transformation de la droite du plan complexe en p
en un cercle de rayon du
plan complexe en z ().
pôles
complexes : forme canonique les pôles
se situent alors sur des droites passant par l’origine et faisant un angle avec l’axe des imaginaires
avec
d’où la transformation des deux demi-droites
en deux demi-spirales
(cardioïde) du plan complexe z définies à partir de ()
Domaines
de stabilité : passage des plans complexes p en z
Nous
pouvons après ce parallélisme
développer ou adapter les méthodes
présentées pour le continu à des
équivalents
dans le domaine échantillonné : lieux des racines ou
d’Evans (test module
des racines inférieur à l’unité),
critère algébrique adaptation du critère de Routh
en imposant les conditions qui conduisent à des racines de
l’équation
caractéristique en z à un module inférieur à l’unité (critère de Jury).
Ces critères existent et
conduisent à des calculs un peu plus délicats vu le test sur le module. Nous
présentons le changement de variable qui permet de se ramener aux critères
algébrique (Routh) et géométrique (Nyquist simplifié ou du revers) du domaine
continu. L’intérêt de ce changement de variable n’est pas limité à l’analyse
mais aussi à la synthèse des systèmes échantillonnés afin d’appliquer les
méthodes utilisées pour les systèmes continus.