|
|
|
|
1.3. Boucles multiples
|
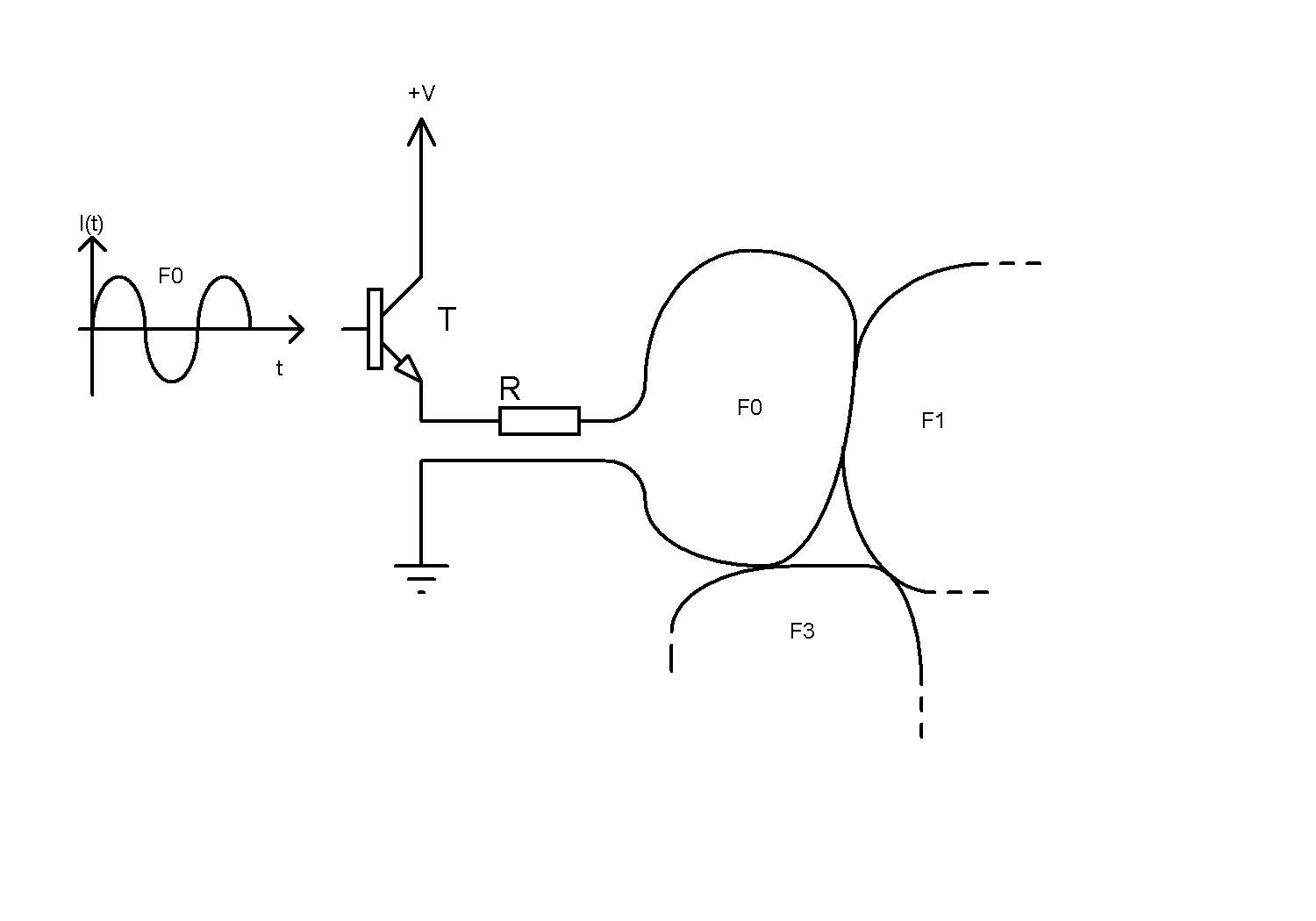
Lorsque
le site comporte plusieurs boucles, un robot peut se trouver, à un instant donné,
à la verticale de plusieurs boucles et donc détecter plusieurs fréquences.
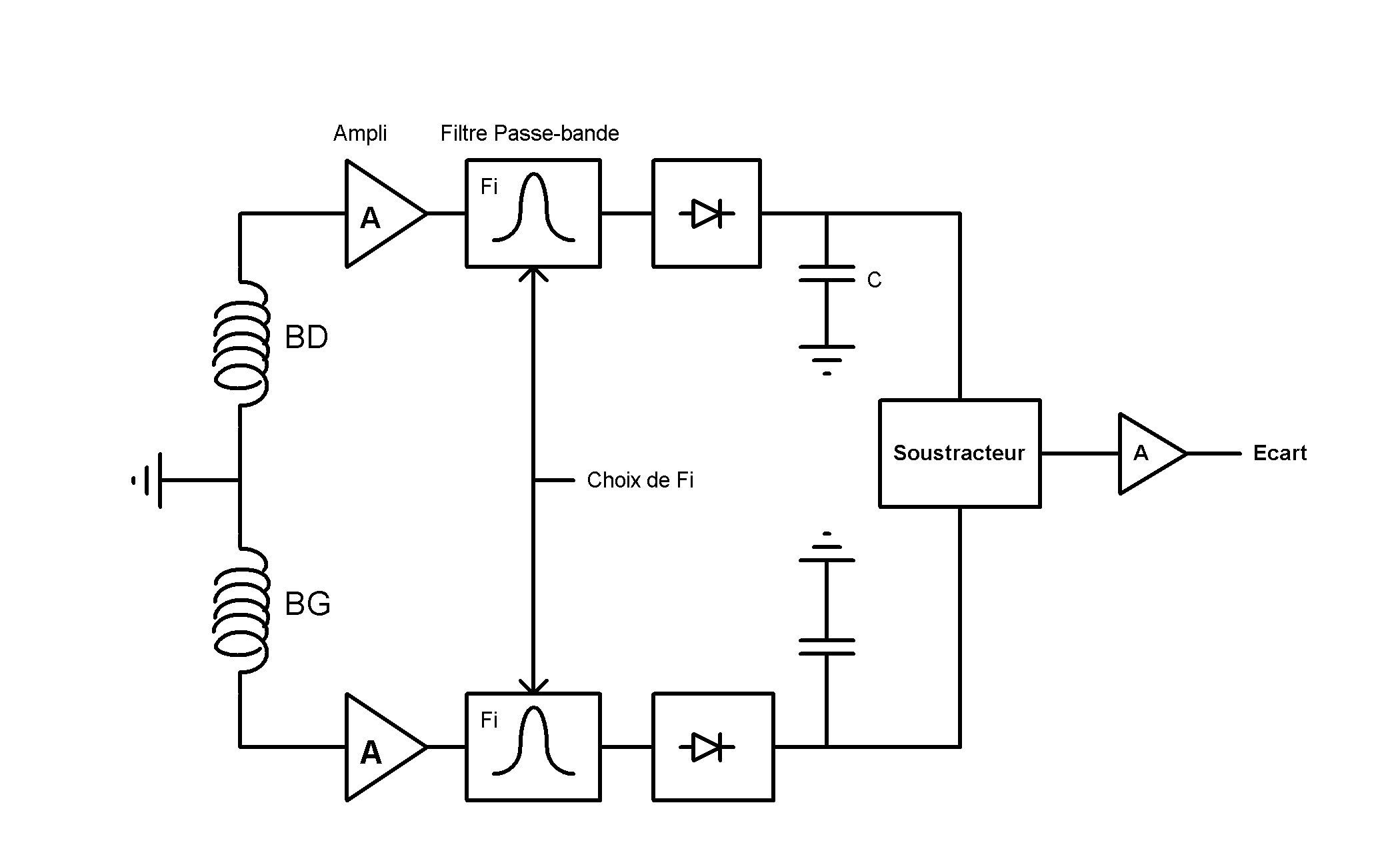
Le choix de la boucle se fera à l'aide d'un filtre passe-bande centré sur la fréquence
de la boucle à suivre.
Un dialogue entre le robot et l'unité de supervision permet de faire le choix de
l'itinéraire du robot. |
|
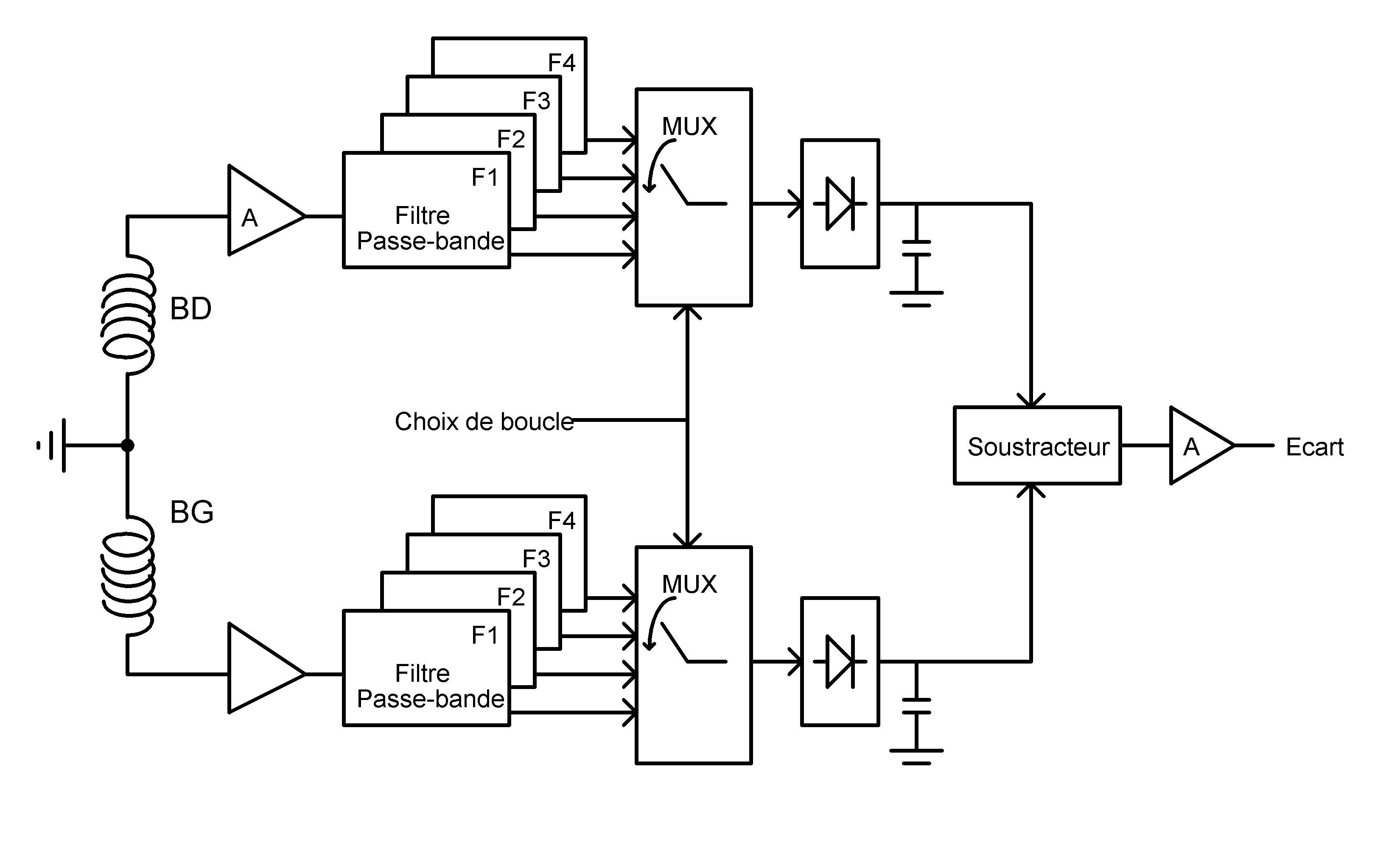
Il
serait envisageable de n'utiliser qu'un seul filtre à fréquence de coupure variable, par
exemple un filtre à capacités commutées.
Cette solution, bien que séduisante, s'avère délicate à mettre en œuvre.
Il est préférable de réaliser N filtres passe-bandes indépendants et de sélectionner
par un multiplexeur la sortie du filtre qui nous intéresse.
|
|
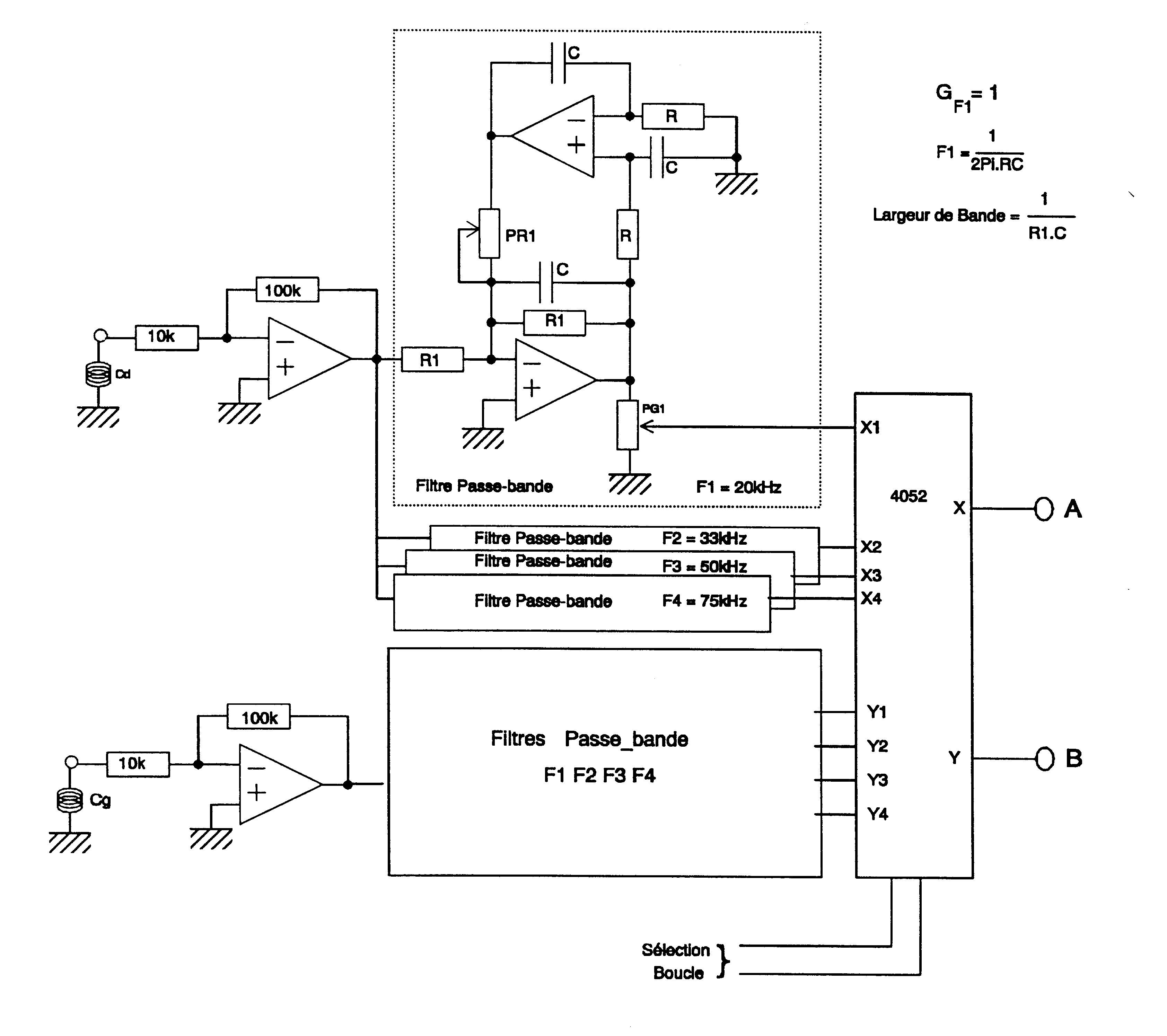
Le
schéma ci-dessous donne un exemple de structure de filtre envisageable. |
|
|
|
|
|
|
