|
|
|
|
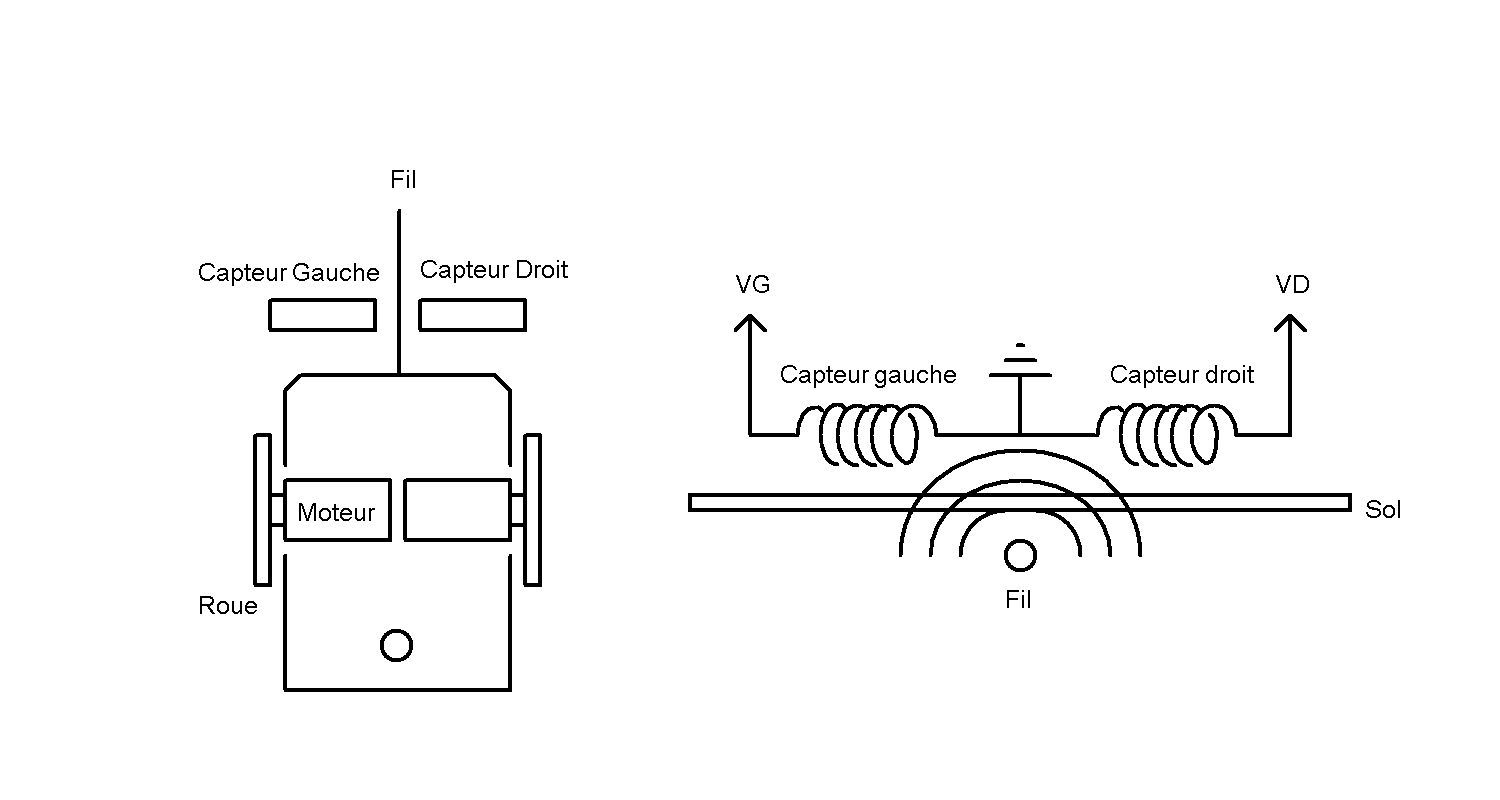
1.2. La détection de boucle
Les caractéristiques des capteurs de position
magnétiques ne sont pas critiques.
Les bobines décrites ici, ne sont qu'un exemple qui fonctionne.
Il est possible d'augmenter le nombre de spires pour accroître la sensibilité du
capteur,
ou d'écarter ou de rapprocher ces capteurs l'un par rapport à l'autre.
Le seul critère à respecter, est que les deux capteurs doivent être identiques.
Ces bobines sont constituées chacune de100 spires de fil émaillé de diamètre 0.3mm,
montées sur un barreau de ferrite de longueur 170mm et de 10mm diamètre.
Ces deux bobines sont écartées de 10mm l'une de l'autre.
|
La valeur
de la tension aux bornes d'une bobine est donc proportionnelle à la fréquence.
La tension V(t) doit être pondérée par un facteur k dépendant de la hauteur des
capteurs par rapport au sol.
|
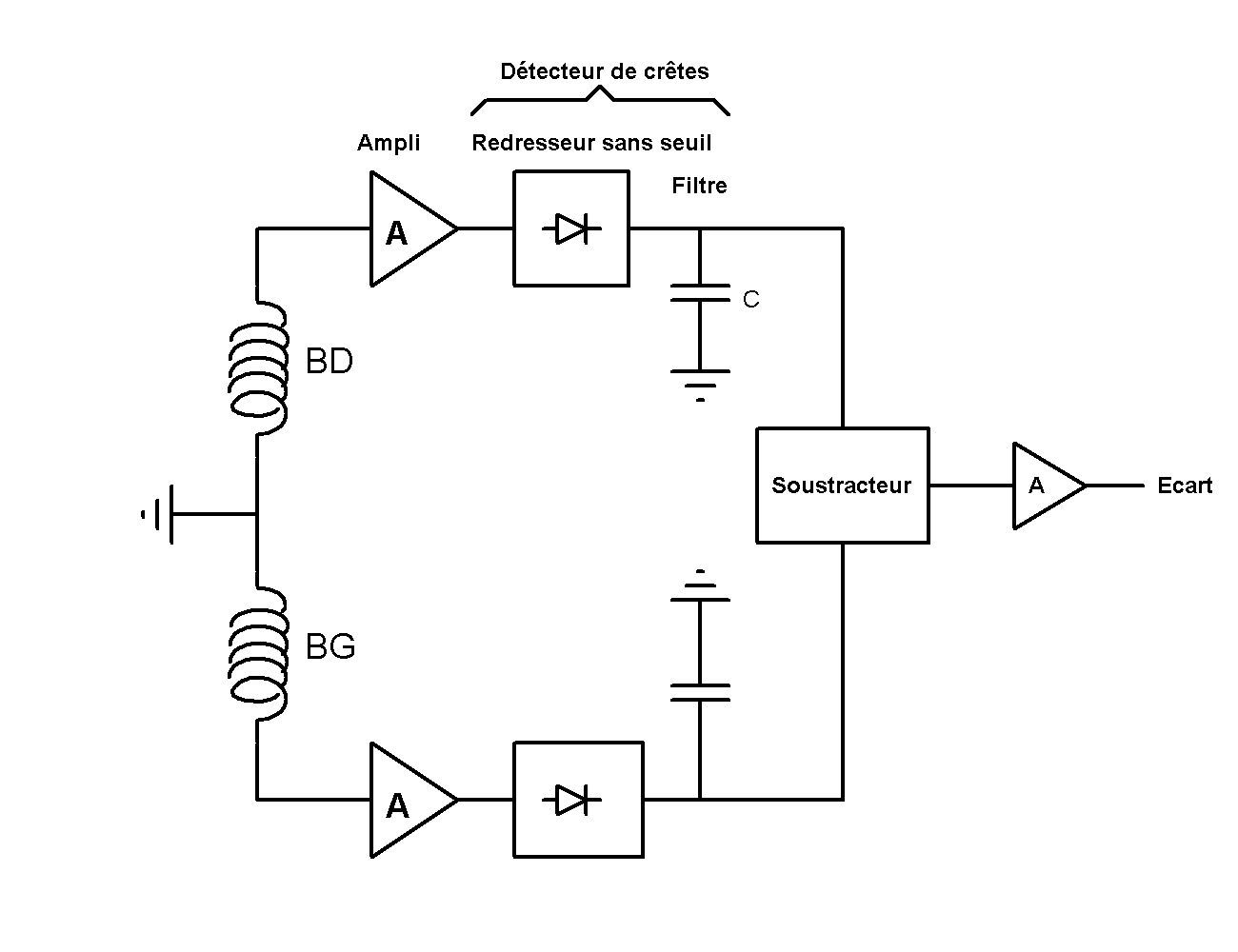
La tension sinusoïdale issue de chaque bobine est
amplifiée, redressée (sans seuil) puis filtrée.
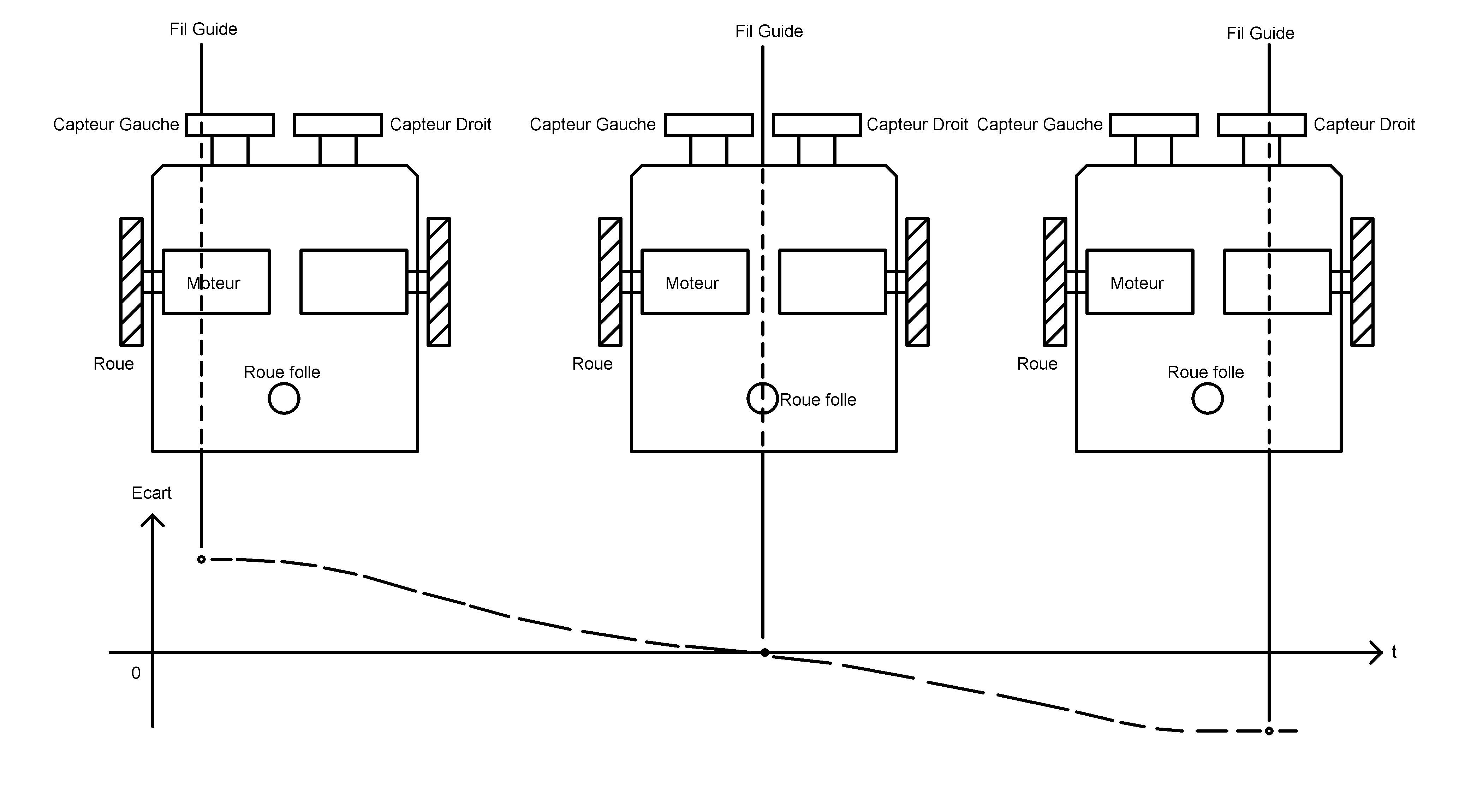
Lorsque le robot s'écarte de l'axe du fil (par exemple à droite), l'énergie reçue par
le capteur droit
est plus importante que celle reçue par le capteur gauche.
La différence entre les signaux issus des deux bobines est une tension continue
représentative
de l'écart entre le centre des capteurs et l'axe du fil.
|
Le signal écart est nul lorsque le robot est
centré sur le fil, positif pour un décalage dans un sens
et négatif dans l'autre sens.
|
|
|
|
|
|
