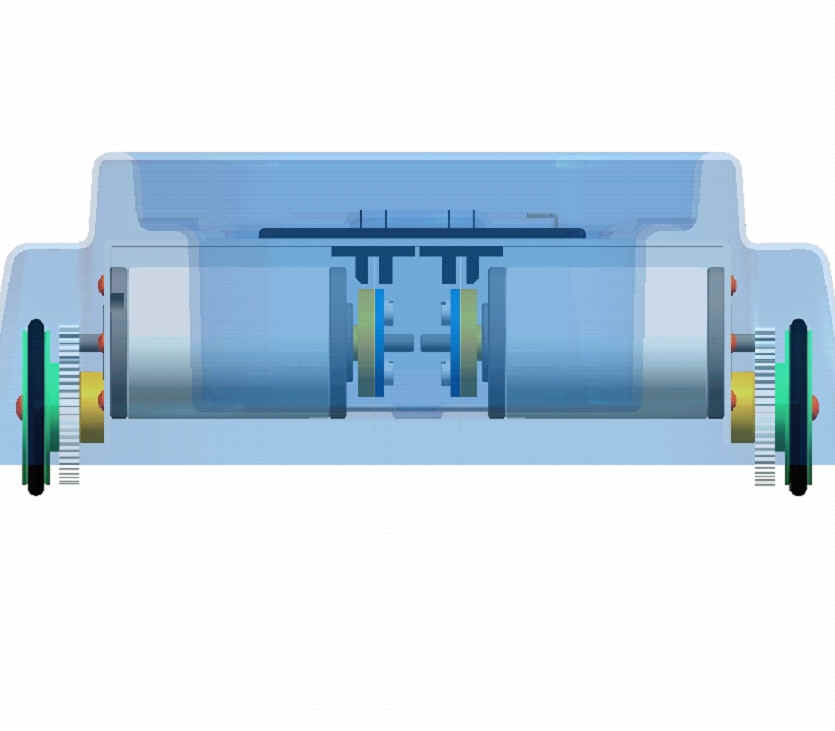
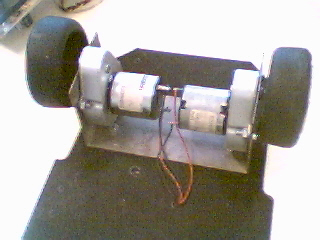
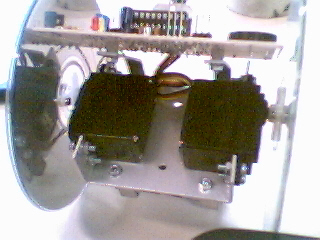
Des
servomoteurs de modélisme font, à moindre coût, de très bons moteurs. Ils disposent,
dans un encombrement réduit, d'un réducteur et d'un moteur. Une petite
modification est nécessaire pour permettre à l'axe de sortie de tourner librement.
|
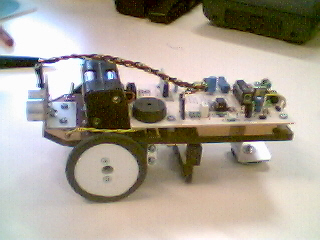
Utilisation
de CD en guise de roues

|