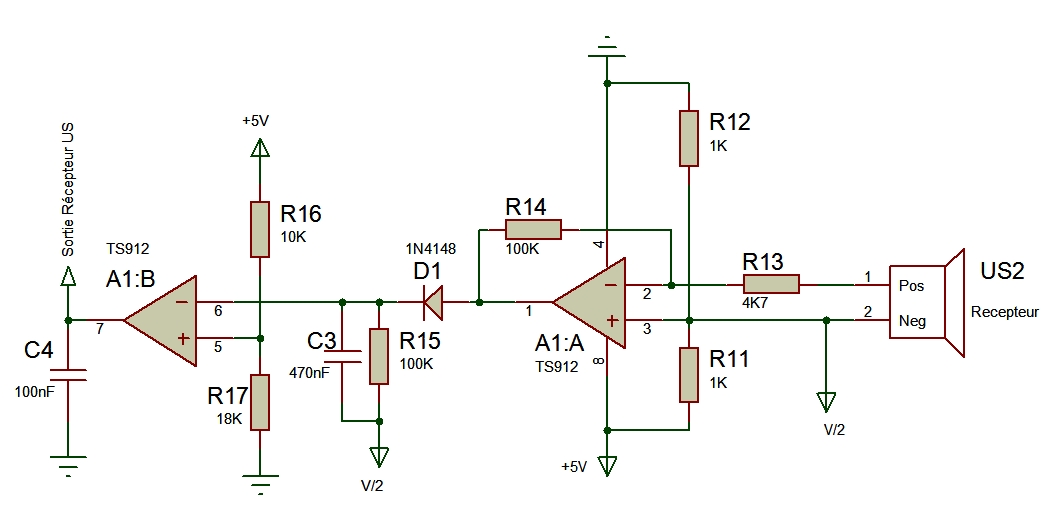
Le récepteur fait appel à un double AOP (Amplificateur Opérationnel) TS922.
Le premier étage est un amplificateur de gain 20.
(Il est possible de remplacer R14 par un potentiomètre de réglage du gain)
La sortie de l'AOP A:A est une
sinusoïde de fréquence 40kHz.
Cette sinusoïde est redressée par D1 et filtrée grâce à C3.
Une tension continue, représentative de la distance émetteur/cible, est présente sur
l'entrée (-) du comparateur A1:B.
Cette tension est comparée à une tension de seuil fixée par R16 et R17.
Lorsque la cible se rapproche, la tension de seuil est dépassée et la sortie du
comparateur passe au niveau bas.
 |

