Principe du radar ultrasonore
Supposons une onde ultrasonore (OUS) de fréquence
40kHz.
Cette OUS se propage dans l'air à la vitesse c = 340m/s et rencontre une cible se
rapprochant.
Une partie de l'énergie émise est absorbée par la cible et une autre partie renvoyée
sous forme d'écho vers l'émetteur.
L'intensité sonore diminue de façon exponentielle avec la distance :
L'amplitude de l'écho E dépend donc de la distance émetteur/cible, de la
fréquence et du matériau constituant la cible.
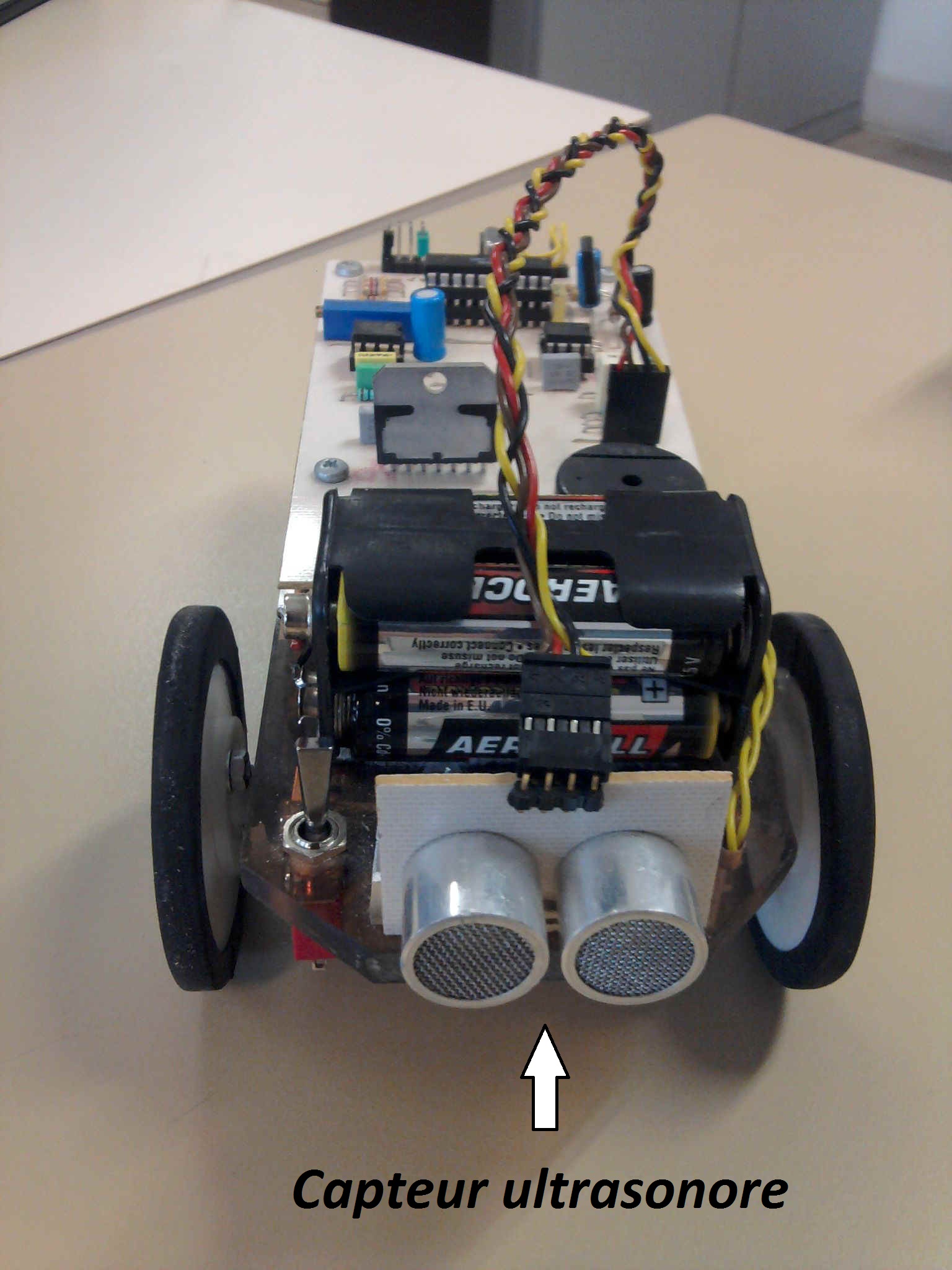
Le récepteur de notre robot compare l'amplitude
de l'écho à un seuil de détection..
Il ne s'agit pas ici de mesurer une distance, mais de déterminer la présence éventuelle
d'un obstacle proche.
Il est à noter que des cibles constituées de matériaux différents, seront détectées
à des distances différentes.
|