La plupart des servomoteurs du commerce peuvent être modifiés en moteurs.
(Il est inutile d'acheter des servomoteurs de qualité.)
Cette transformation peut être réalisée de différentes façons, suivant le type
et la marque du servomoteur.
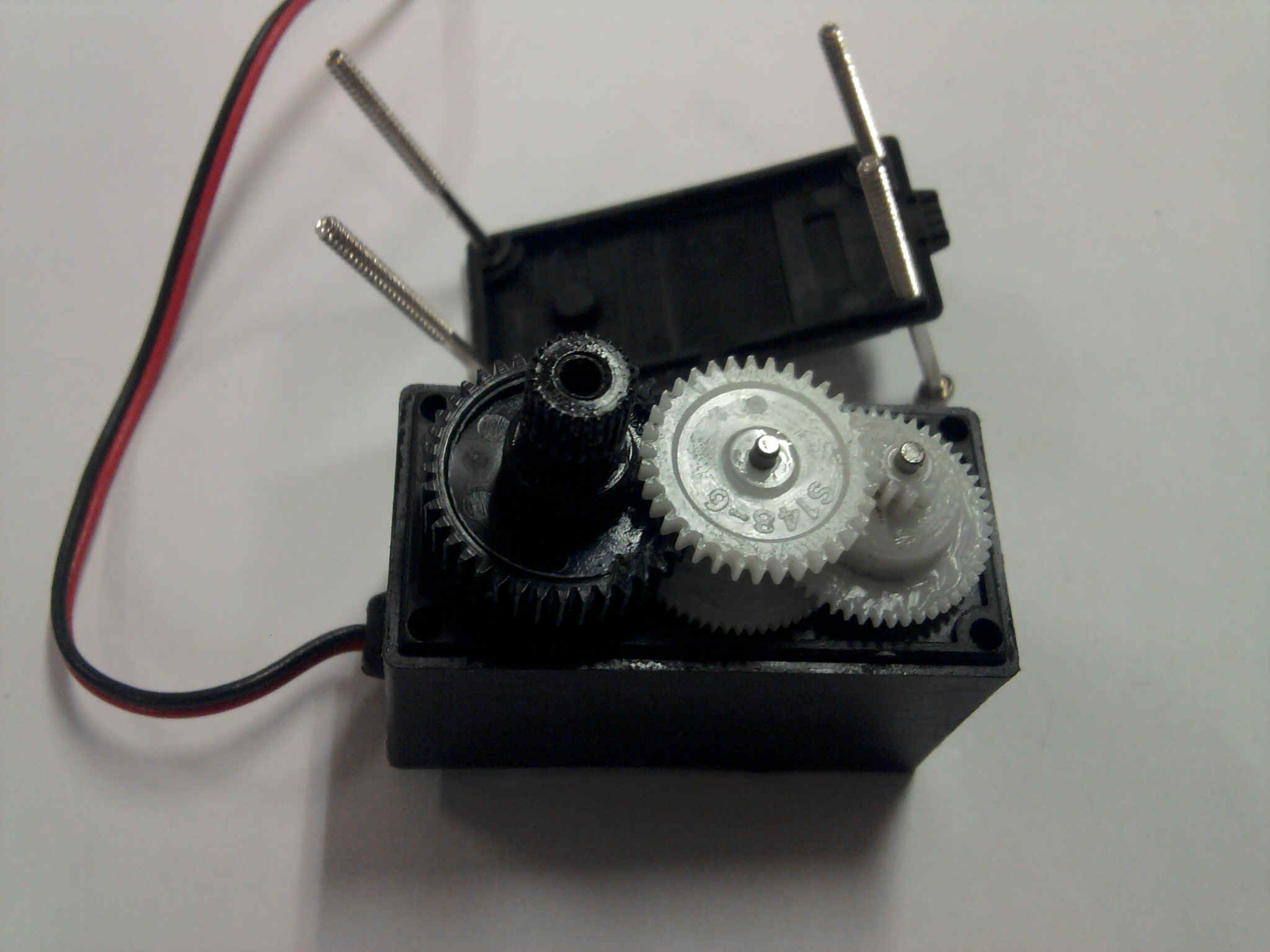
Démonter le
servomoteur en prenant soin de ne pas perdre les pièces du réducteur...
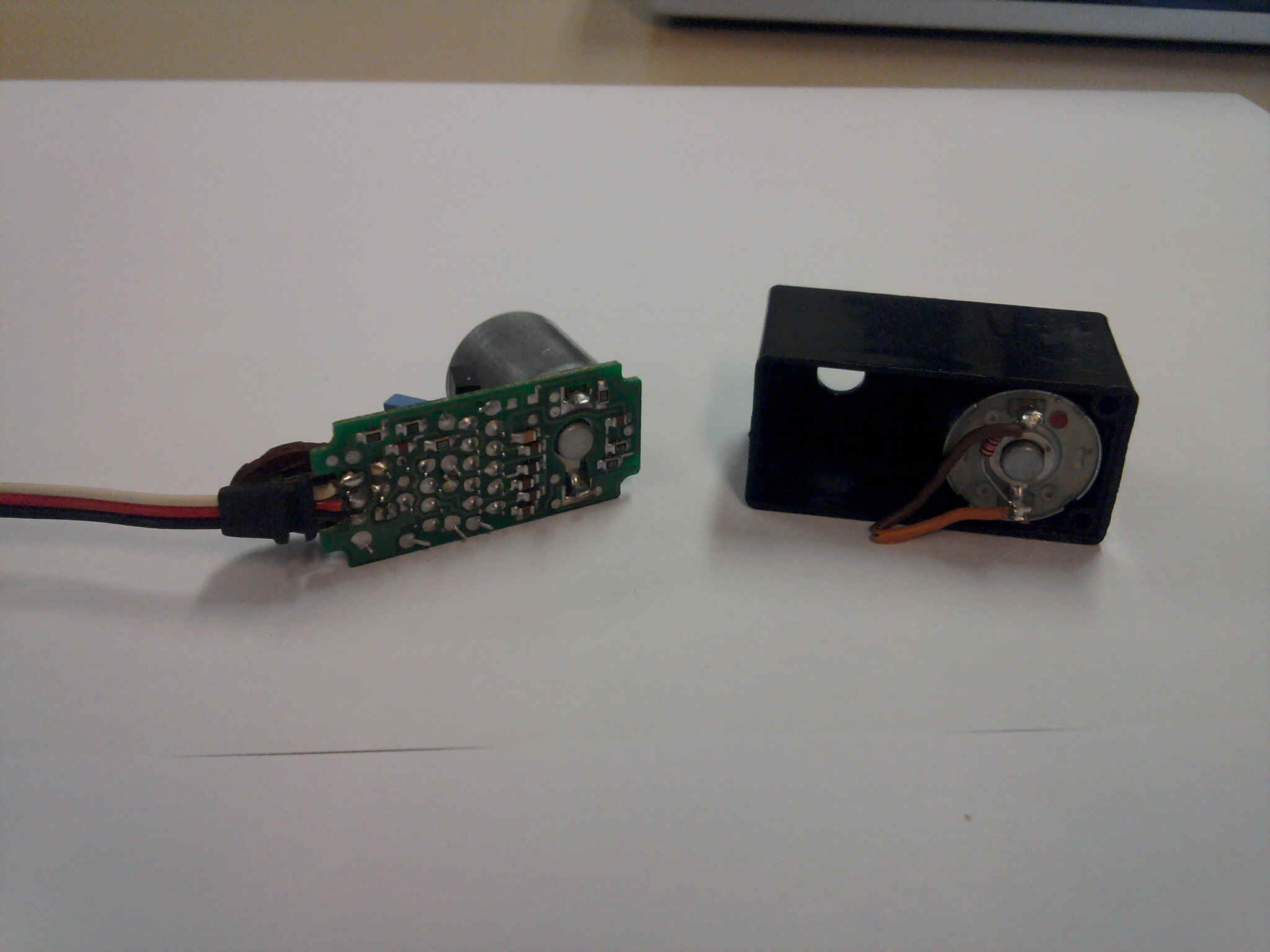
Démonter l'électronique et connecter les deux fils d'alimentation (noir/rouge)
directement aux bornes du moteur.
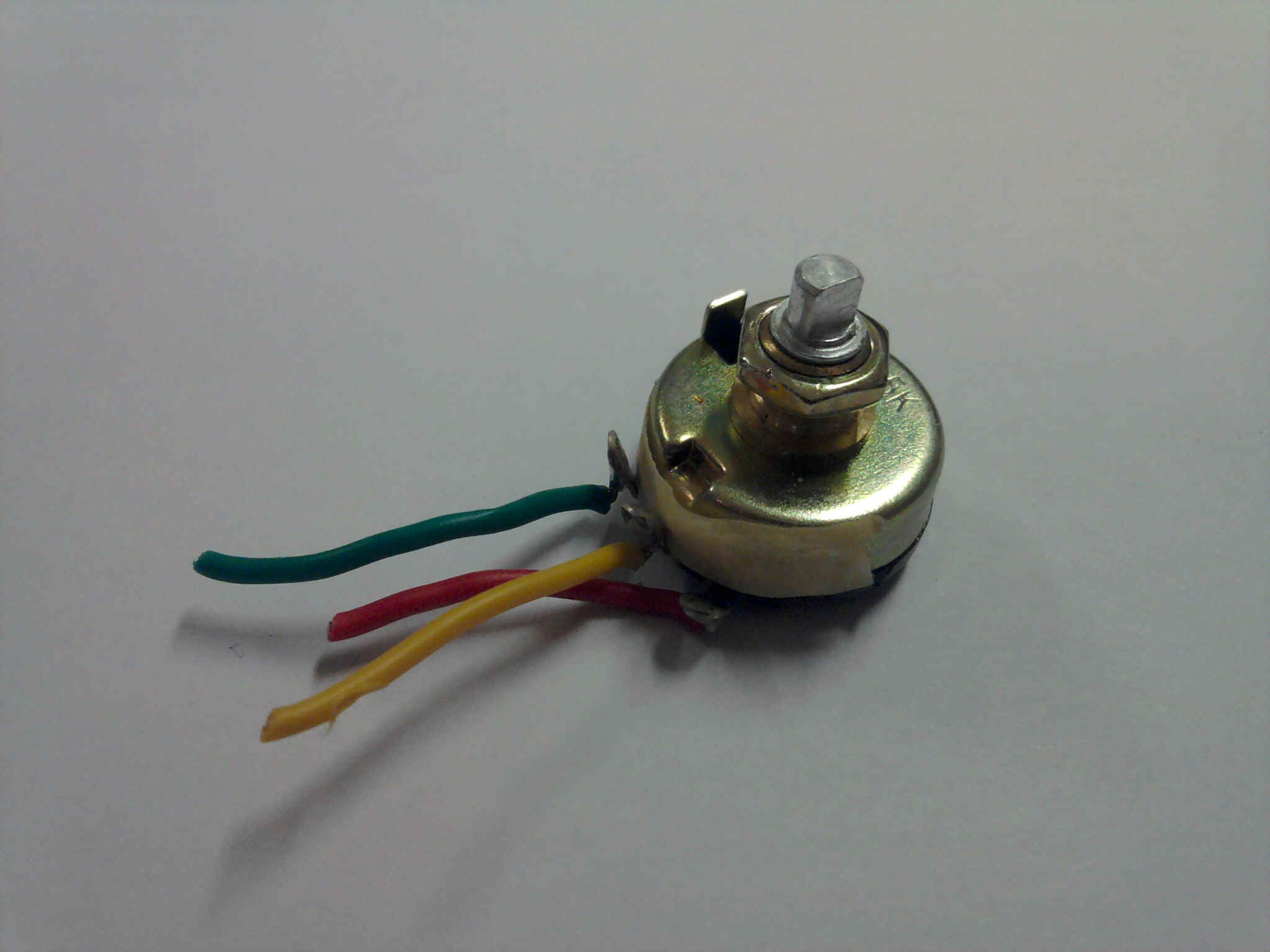
La partie délicate consiste à modifier le capteur de position (potentiomètre).
L'axe de ce potentiomètre est conservé, mais il faut que celui-ci tourne librement sur
360°.
Il faut ensuite
limer l'ergot de blocage un tour du pignon de sortie du réducteur.
La rotation de l'axe du réducteur, prévue initialement pour n'effectuer qu'un tour, doit
être libre dans les deux sens.
|
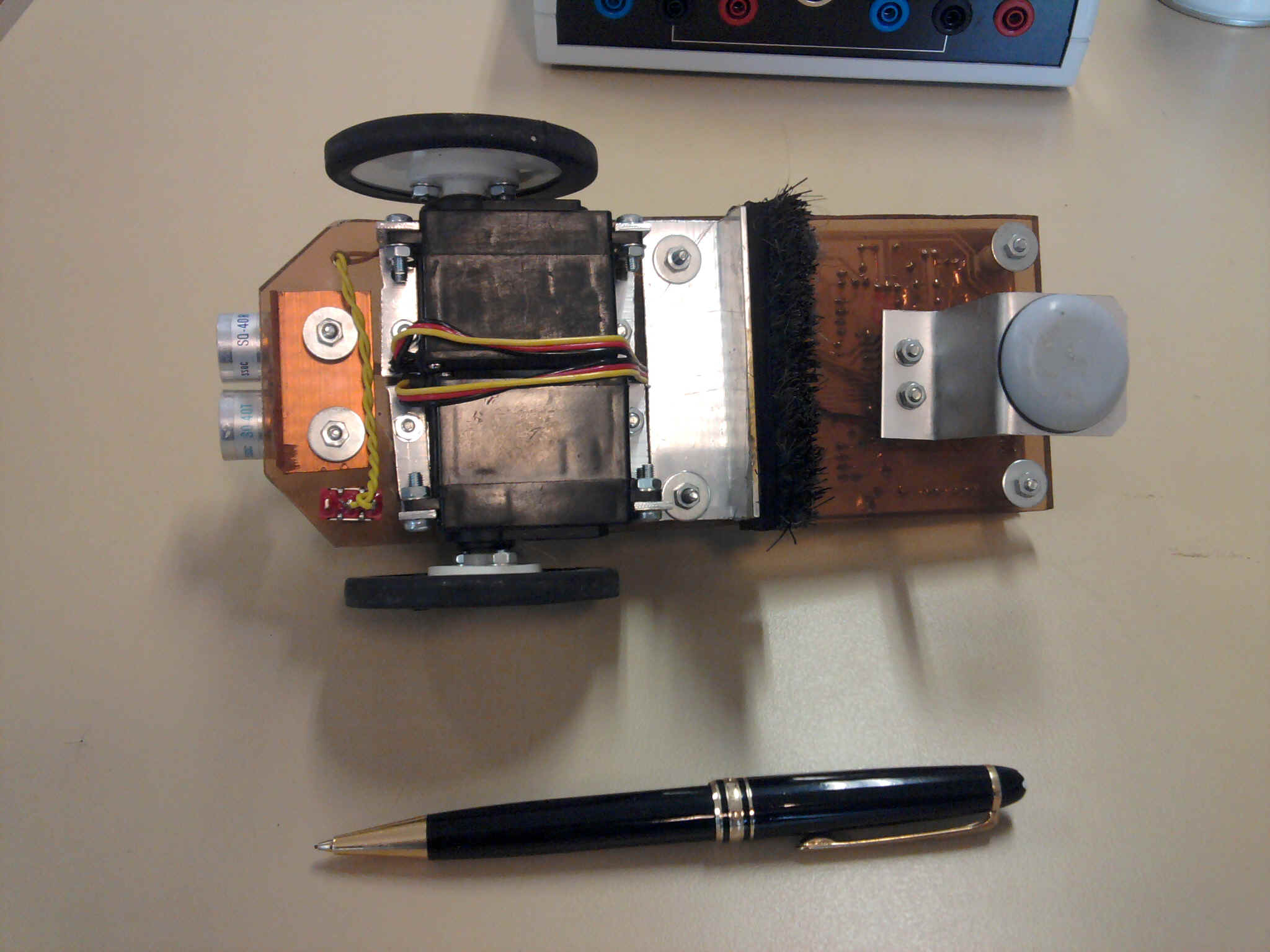
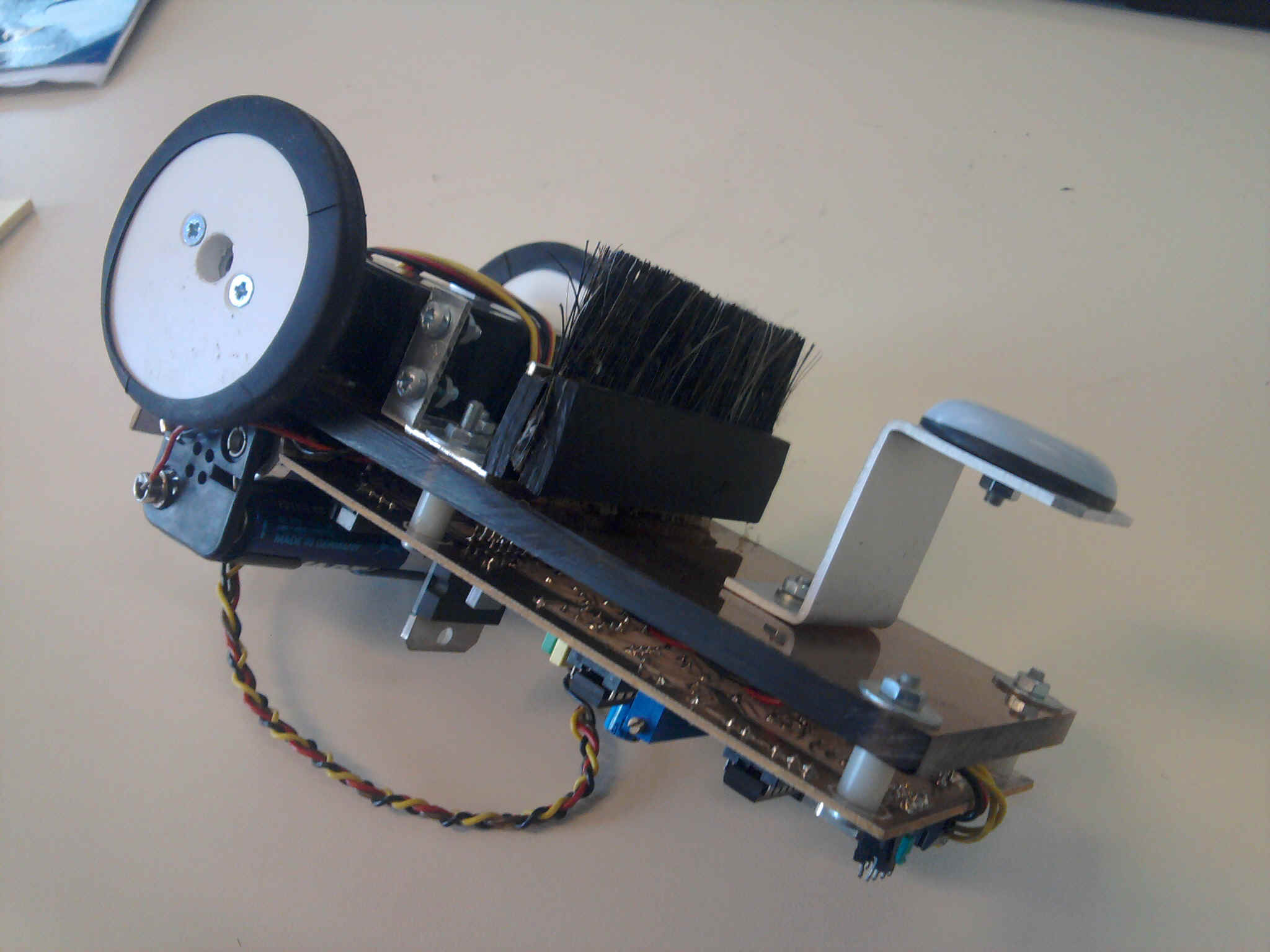
Des roues, (rondelles de PVC 55mm de diamètre),sont
rendues solidaires de l'axe cranté du servo.
Le pneu est constitué d'une "tranche" de chambre à air de vélo, permettant à
la roue d'adhérer au sol (indispensable).
Le diamètre des roues peut être augmenté si l'on souhaite donner au mobile une vitesse
plus importante.

|
Quatre piles LR6 de 1.5V assurent l'alimentation
de notre robot, soit 6V.
La fixation du support de piles est assurée par du velcro auto-collant.
Un interrupteur marche/arrêt permet la mise en route du robot.

|