Une version améliorée de cet émetteur permet
d'augmenter la distance de détection.
Deux portes NAND, montées en inverseurs, permettent de faire fonctionner le
transducteur en mode différentiel. (Les portes NAND sont alimentées sous 5V)
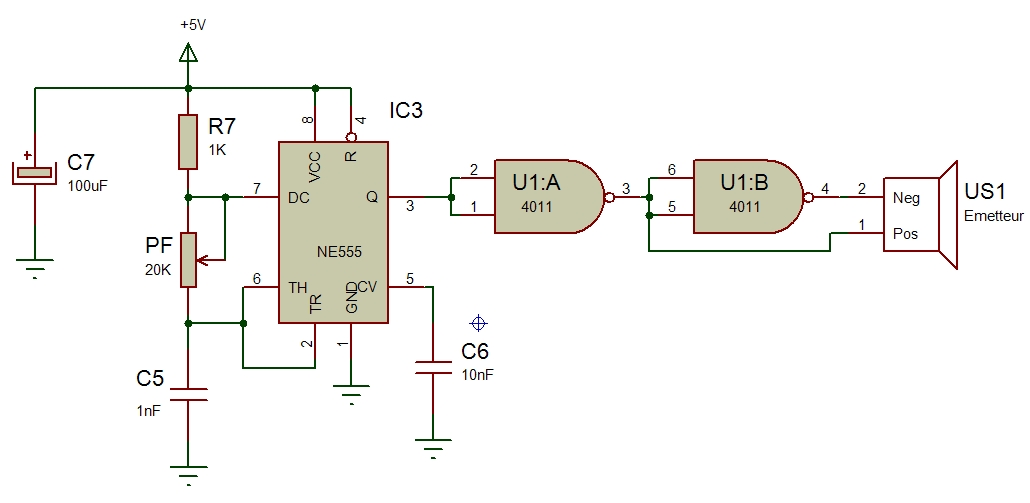
Ces deux montages émetteurs sont envisageables pour notre application.
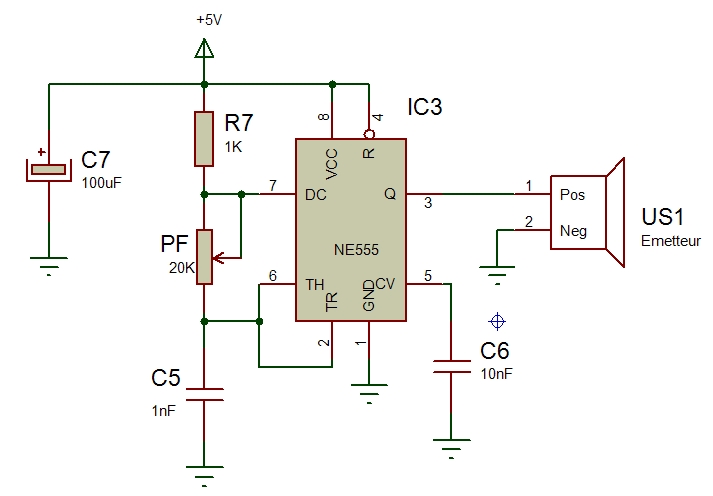
Dans les deux cas, la distance maximale de
détection est réglée en modifiant la fréquence de l'oscillateur.
Les transducteurs réagissent comme des filtres passe-bandes, le décalage de la
fréquence d'oscillation se traduit par une baisse de l'énergie ultrasonore émise. |